Language



























Visninger: 17 Forfatter: Nettstedredaktør Publiseringstidspunkt: 2020-06-08 Opprinnelse: nettsted








Komponent -ultralydsensorene som må oppføres når de bruker ultralyd for å lage arduino-radar.
Arduino Board (jeg bruker arduino Uno)
Servomotor (mg-996)
HC-SR04 ultralydsensor
Breadboard Jumper
Trinn 1:
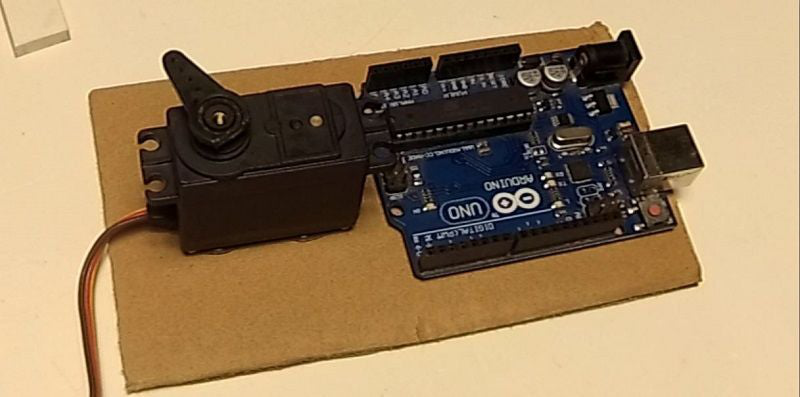
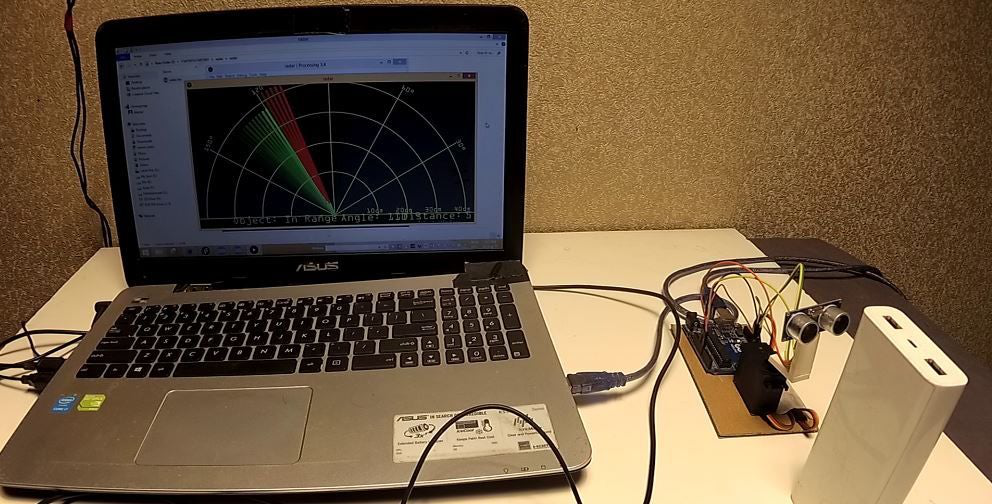
'Først må vi kutte et kartong (15 cm * 8 cm). Deretter limer du arduino- og servomotoren på en piezoelektrisk ultralydsvinger
Trinn 2:
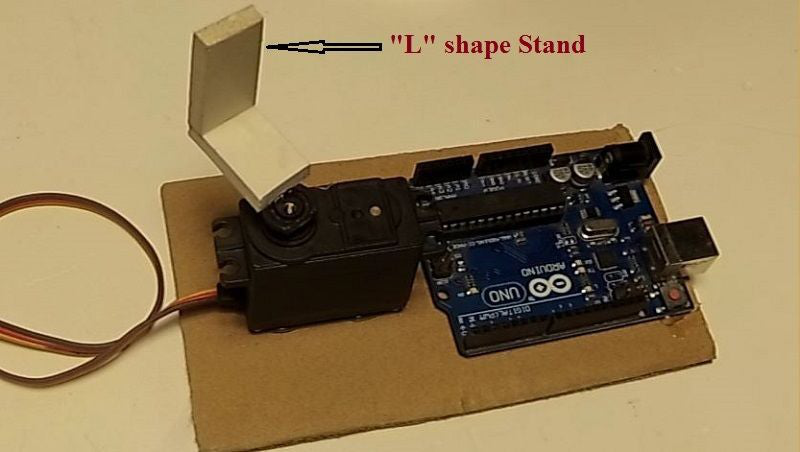
Nå må vi lage en 'L'-formet brakett for ultralydsensoren (HC-SR04) for å holde den på servomotoren.
Trinn 3:

Nå må vi koble ekkoloddsensoren til arduinoen. Vær forsiktig når du kobler VCC og GND til sensoren til henholdsvis 5v og GND til arduino. Etter det, koble trigpinnen til 8 og ekkopinnen til 9 på arduino.
Trinn 4:
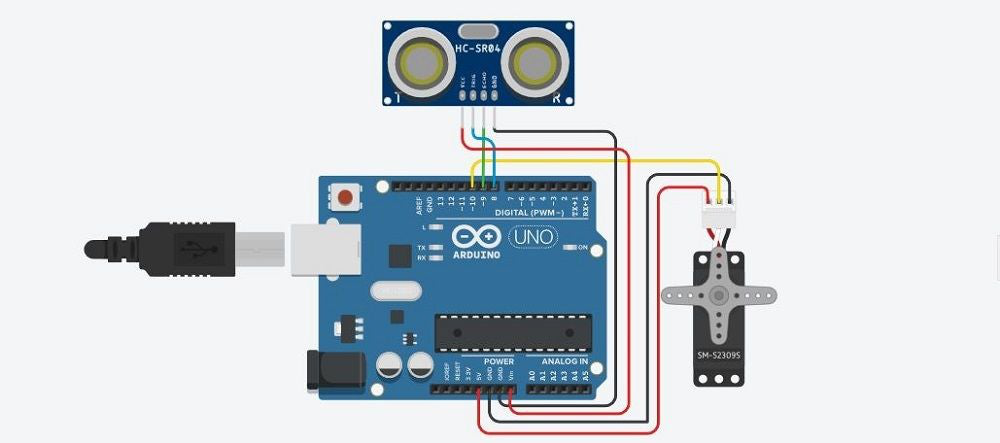
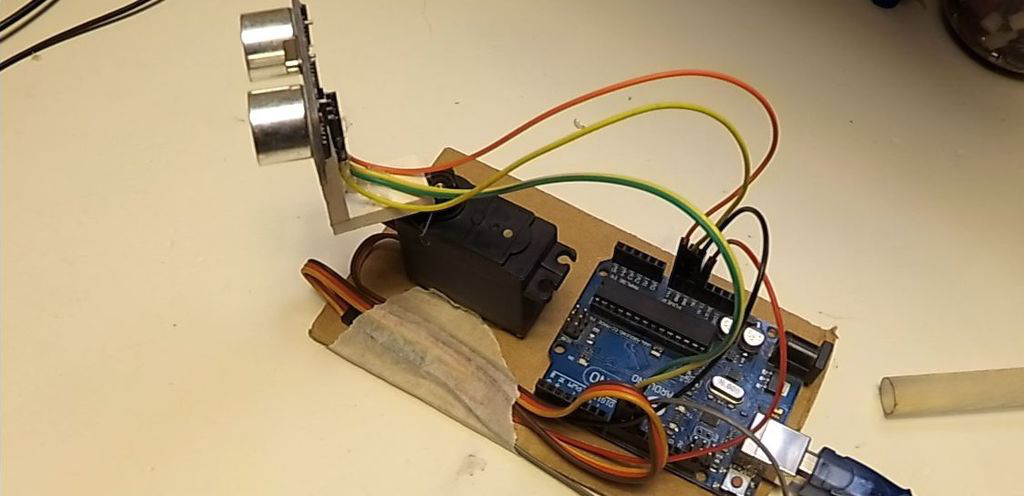
Etter å ha koblet ultralydtransdusersensoren til arduinoen, er det på tide å koble servomotoren til den. Igjen, vær forsiktig med å koble til VCC og GND til servomotoren. Koble servosignalet til pin 10 på arduino.
Trinn 5: Programvare som kreves for Arduino-radar:
Du trenger arduino IDE og Processing IDE for å kjøre radarprosjektet .
Behandling av IDE vil få verdien sendt fra arduino og forklare målområdet (rødt merke). Følg linken for å laste dem ned.
Behandler IDE: https://processing.org/download/support.html
Arduino IDE: https://www.arduino.cc/en/main/software
Trinn 6: Arduino-kode:
#includeconst int TriggerPin = 8;
const int EchoPin = 9;
const int motorSignalPin = 10;
const int startAngle = 90;
const int minimumAngle = 6;
const int maximumAngle = 175;
const int rotationSpeed = 1;
servo motor;
ugyldig oppsett (ugyldig)
{pinMode(TriggerPin, OUTPUT);
pinMode (EchoPin, INPUT);
motor.attach (motorSignalPin);
Serial.begin (9600);
void loop (void)
{static int motorAngle = startAngle;
static int motorRotateAmount = rotationSpeed;
motor.write (motorAngle);
Forsinkelse (10);
SerialOutput (motorAngle, CalculateDistance());
motorAngle + = motorRotateAmount;
(motorAngle '= minimumAngle || motorAngle' = maximumAngle) {motorRotateAmount = -motorRotateAmount;
int CalculateDistance (ugyldig)
{digitalWrite(TriggerPin, HIGH);
forsinkelse Mikrosekunder (10);
digitalWrite (TriggerPin, LOW);
lang varighet = pulseIn (EchoPin, HIGH);
flyteavstand = varighet * 0,017F;
retur int (avstand);
void SerialOutput (konst int vinkel, konstant int avstand)
String angleString = String(angle);
String distanceString = String(distanse);
Serial.println(angleString + ',' + distanceString);
Trinn 7: Håndter IDE:
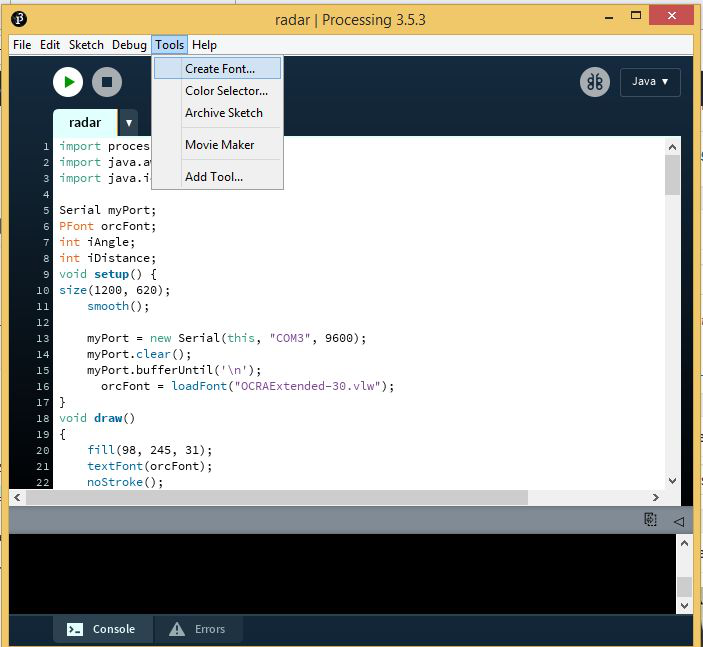
Vi kan bruke prosesserings-IDE for enkelt å finne ethvert objekt innenfor området (40 cm). Hvis det ikke er noen IDE på din PC, last den ned. Før vi bruker denne IDE, må vi konfigurere fonten.
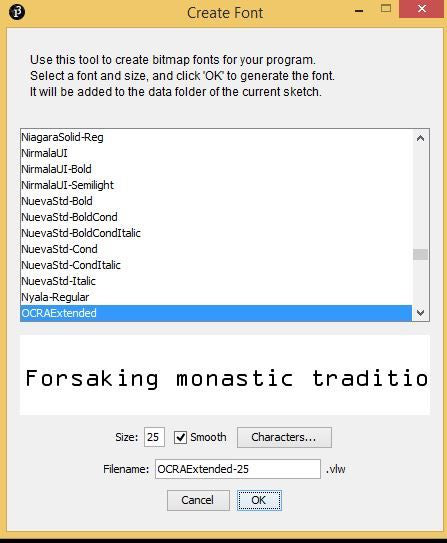
For å gjøre dette må vi installere filen 'OCRAEXT.TTF' som ligger i Radar.zip. Gå deretter til verktøy/opprett skrift. Velg 'OCRAExtended' fra listen, velg en skriftstørrelse på 25 og klikk 'OK'.
Trinn 8:
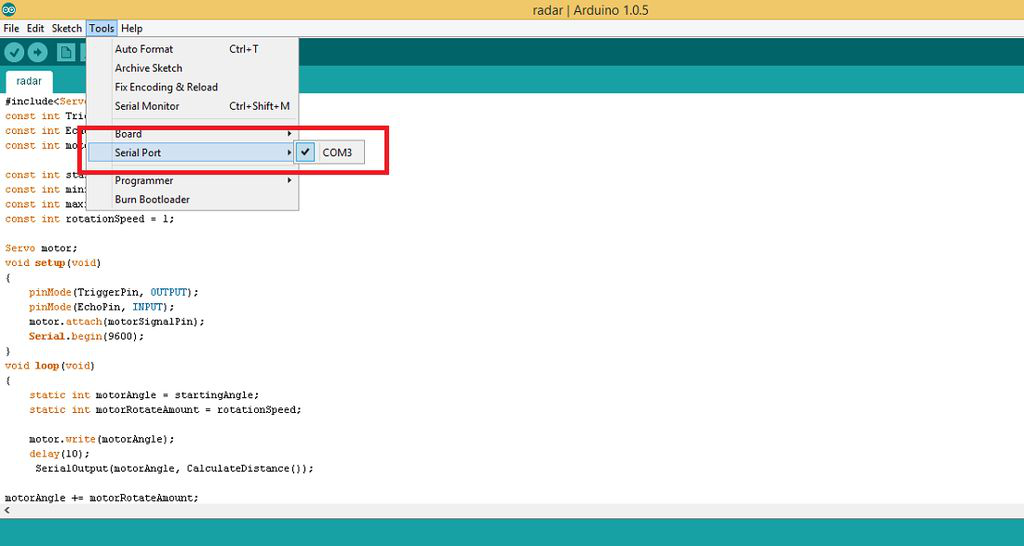
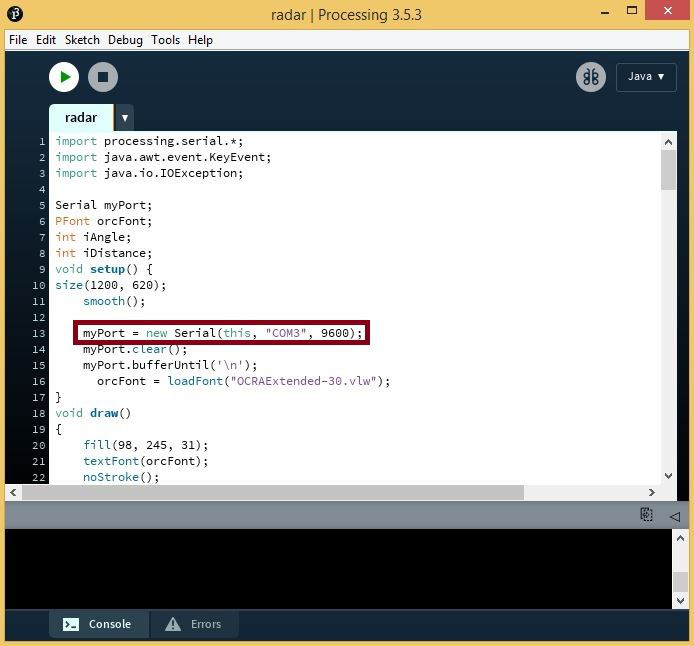
Nå må vi finne COM-portnummeret. Gå til Arduino IDE og finn Com-porten (COM3 på bildet). Plasser COM-portnummeret på linje 13 i behandlingskoden (COM3 på bildet).
Trinn 9:
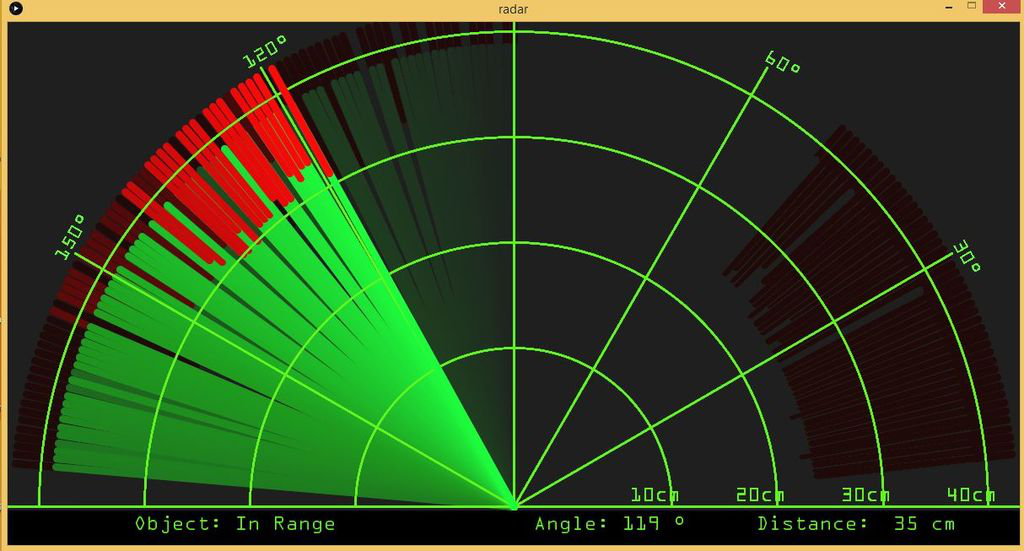
Til slutt, trykk på 'Kjør'-knappen vil vise et behandlingsvindu. Den vil vise radarservovinkelen og objektavstanden til den piezoelektriske ultralydsensoren.






 Tech Co,.Ltd")