Language



































コンポーネントの 超音波センサー。 にリストする必要がある 場合 超音波を使用して Arduino レーダーを作成する
Arduinoボード(Arduino Unoを使用)
サーボモーター(mg-996)
HC-SR04 超音波センサー
ブレッドボードジャンパー
ステップ1:
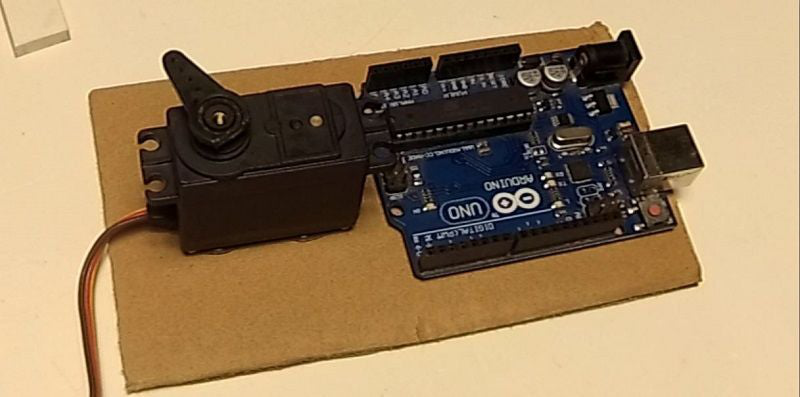
「まず、ボール紙(15cm * 8cm)を切ります。次に、 圧電超音波トランスデューサーにArduinoとサーボモーターを接着します。
ステップ2:
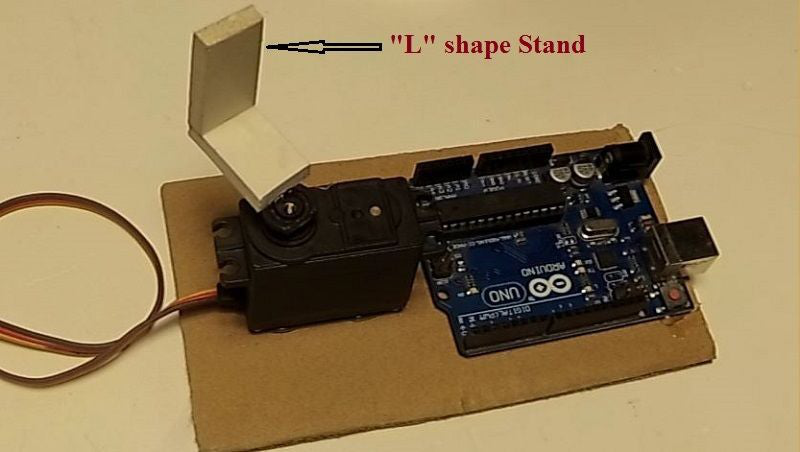
ここで、超音波センサー (HC-SR04) をサーボモーターに固定するための「L」字型ブラケットを作成する必要があります。
ステップ3:

次に、ソナーセンサーをArduinoに接続する必要があります。は注意してください。 場合 センサーのVCCとGNDをArduinoの5VとGNDにそれぞれ接続するその後、arduinoの8にtrigピン、9にechoピンを接続します。
ステップ4:
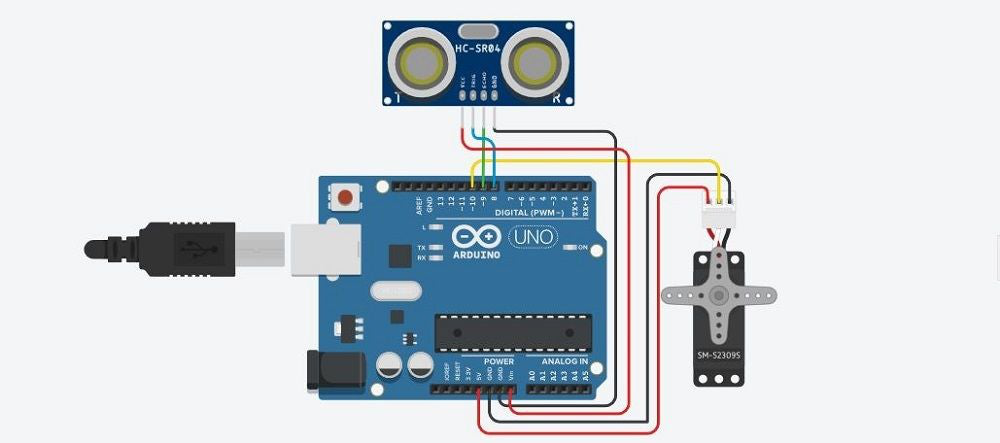
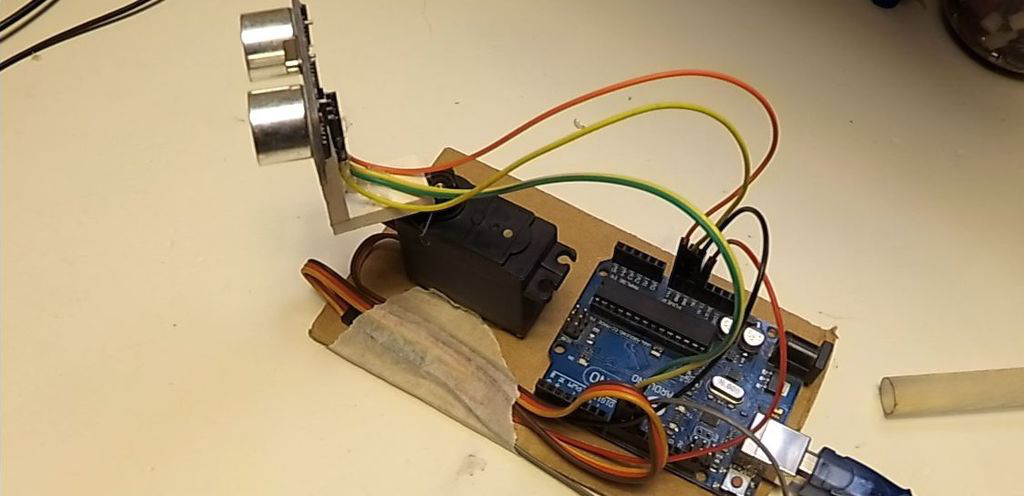
接続したら超音波トランスデューサーセンサーをArduinoに、サーボモーターをArduinoに接続します。繰り返しますが、サーボモーターの VCC と GND の接続には注意してください。サーボ信号をArduinoのピン10に接続します。
ステップ 5: Arduino レーダーに必要なソフトウェア:
レーダープロジェクトを実行するには、Arduino IDE と Processing IDE が必要です 。
Processing IDEはarduinoから送られてきた値を取得し、対象領域(赤マーク)を解説します。リンクに従ってダウンロードしてください。
処理 IDE: https://processing.org/download/support.html
Arduino IDE: https://www.arduino.cc/en/main/software
ステップ 6: Arduino コード:
#includeconst int トリガーピン = 8;
const int EchoPin = 9;
const int モーター信号ピン = 10;
const int startingAngle = 90;
const int minimumAngle = 6;
const int minimumAngle = 175;
const int 回転速度 = 1;
サーボモーター。
無効セットアップ (無効)
{ピンモード(トリガーピン, 出力);
pinMode (EchoPin、入力);
Motor.attach (motorSignalPin);
シリアル.begin (9600);
ボイドループ(ボイド)
{static int motorAngle = startingAngle;
静的 int モータ回転量 = 回転速度;
Motor.write (モーター角度);
遅延 (10);
SerialOutput (motorAngle, CalculateDistance());
モーター角度 + = モーター回転量;
(motorAngle '= minimumAngle || motorAngle' = minimumAngle) {motorRotateAmount = -motorRotateAmount;
int CalculateDistance (void)
{digitalWrite(トリガーピン、HIGH);
遅延マイクロ秒 (10);
デジタル書き込み (トリガーピン、LOW);
長い持続時間 = パルス入力 (EchoPin、HIGH);
フロート距離 = 期間 * 0.017F;
int (距離) を返します。
void SerialOutput (定数 int 角度、定数 int 距離)
文字列 angleString = 文字列(角度);
文字列 distanceString = 文字列(距離);
Serial.println(angleString + ',' + distanceString);
ステップ 7: IDE を処理します。
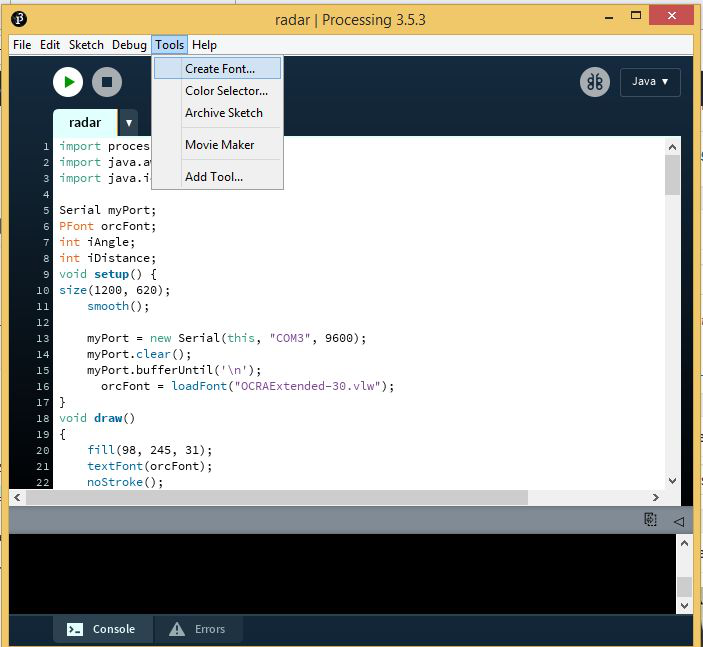
処理 IDE を使用すると、範囲 (40 cm) 内の任意のオブジェクトを簡単に見つけることができます。 PC に IDE がない場合は、ダウンロードしてください。この IDE を使用する前に、フォントを設定する必要があります。
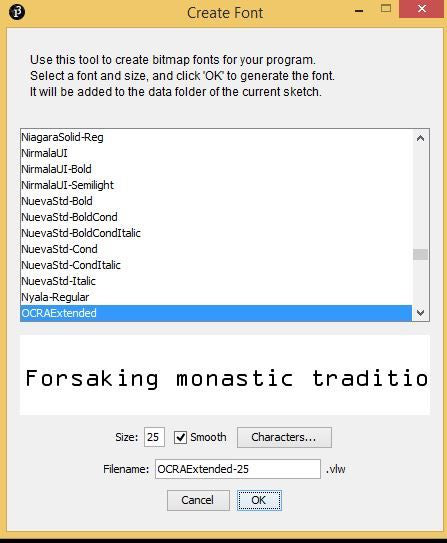
これを行うには、Radar.zip にある 'OCRAEXT.TTF' ファイルをインストールする必要があります。次に、ツール/フォントの作成に移動します。リストから「OCRAExtended」を選択し、フォント サイズ 25 を選択して、「OK」をクリックします。
ステップ8:
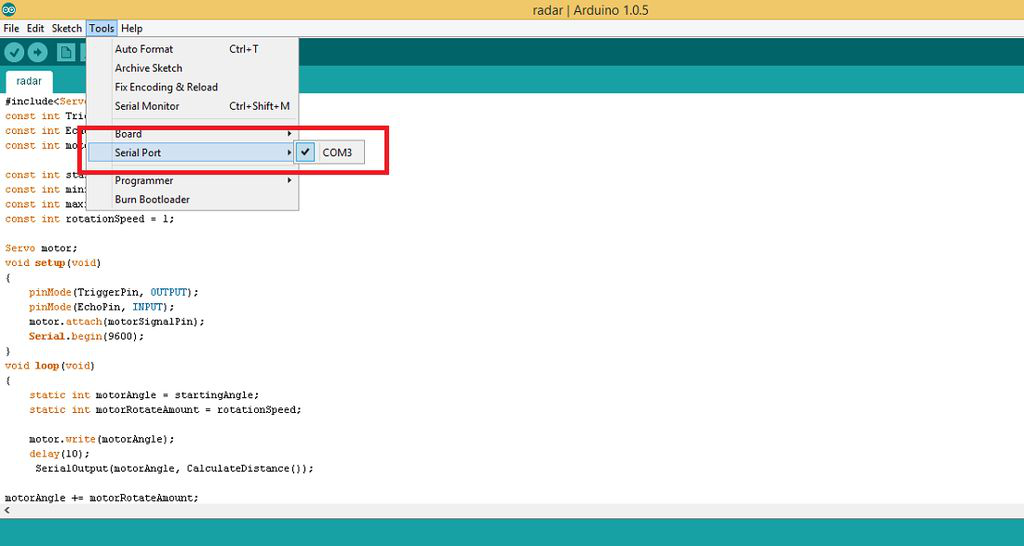
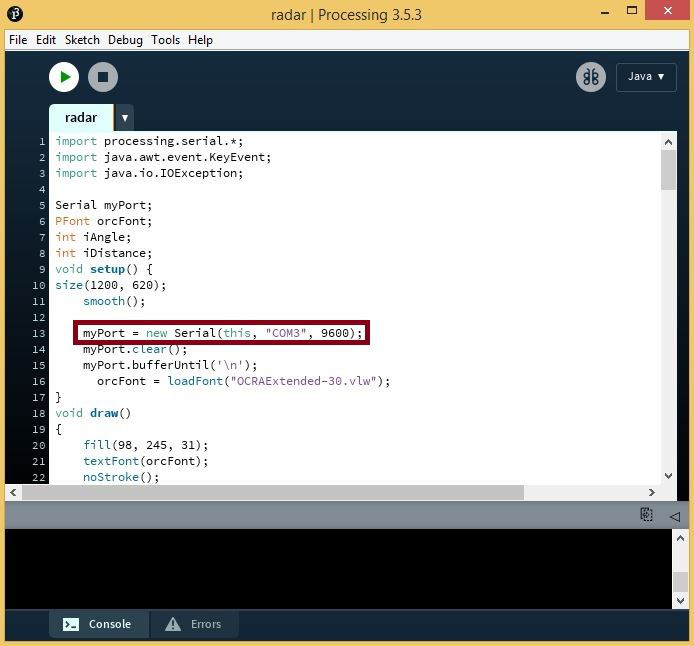
次に、COM ポート番号を見つける必要があります。 Arduino IDE に移動し、Com ポート (写真では COM3) を見つけます。処理コードの13行目にCOMポート番号を記述します(写真ではCOM3)。
ステップ9:
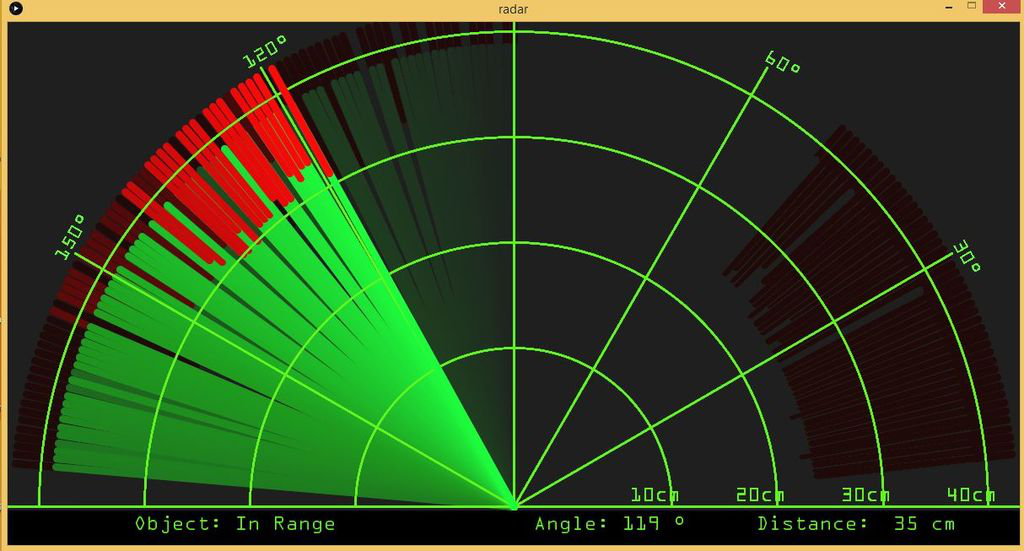
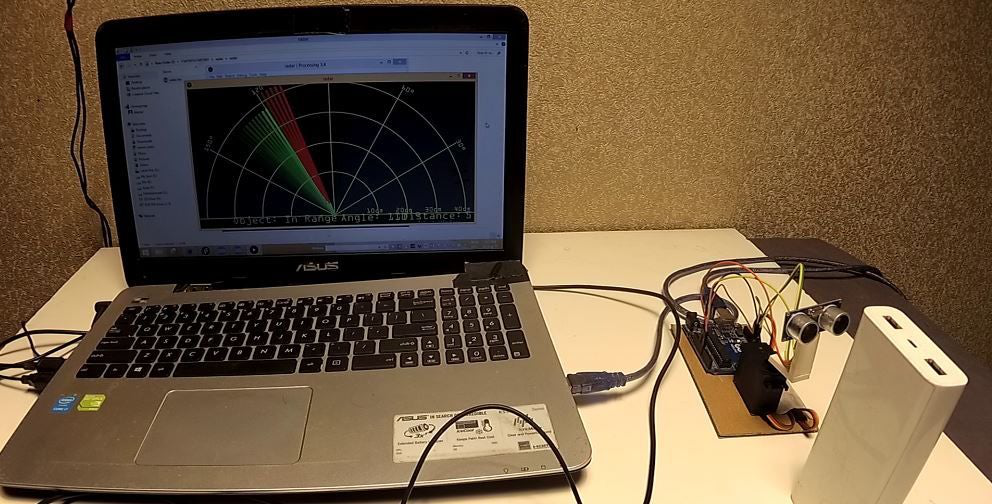
最後に、「実行」ボタンを押すと、処理ウィンドウが表示されます。レーダーサーボ角度と圧電超音波トランスデューサーセンサーの物体距離が表示されます。






 Tech Co,.Ltd")