Language



























Wyświetlenia: 17 Autor: Edytor witryny Czas publikacji: 2020-06-08 Pochodzenie: Strona








Komponentowe czujniki ultradźwiękowe , które należy wymienić, gdy używa się ultradźwięków do tworzenia radaru Arduino.
Płyta Arduino (używam arduino Uno)
Silnik serwo (mg-996)
Czujnik ultradźwiękowy HC-SR04
Zworka do krojenia chleba
Krok 1:
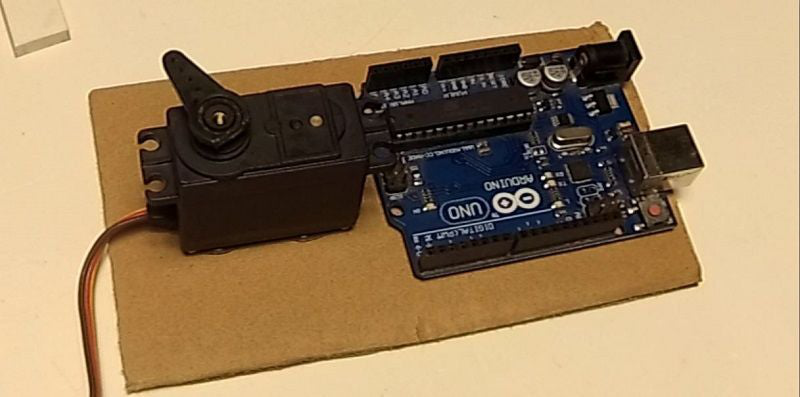
„Najpierw musimy wyciąć tekturę (15cm * 8cm). Następnie przyklej arduino i serwomotor do piezoelektrycznego przetwornika ultradźwiękowego
Krok 2:
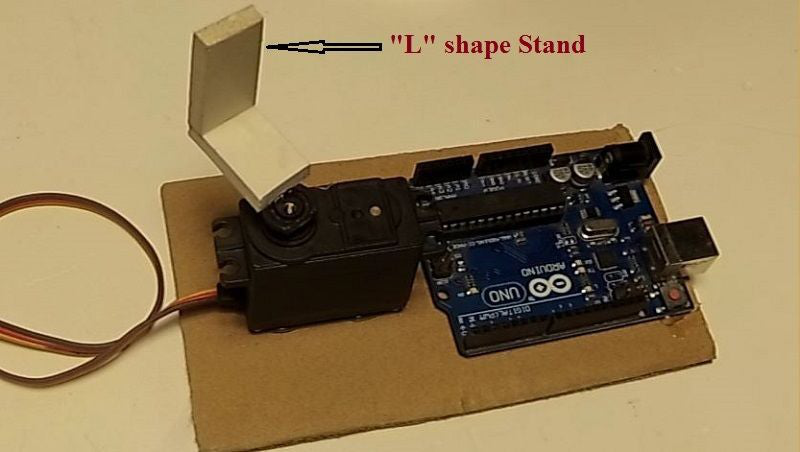
Teraz musimy wykonać wspornik w kształcie litery „L” dla czujnika ultradźwiękowego (HC-SR04), aby utrzymać go na serwomotorze.
Krok 3:

Teraz musimy podłączyć czujnik sonarowy do arduino. Zachowaj ostrożność podczas podłączania VCC i GND czujnika odpowiednio do 5 V i GND arduino. Następnie podłącz pin wyzwalający do 8, a pin echa do 9 Arduino.
Krok 4:
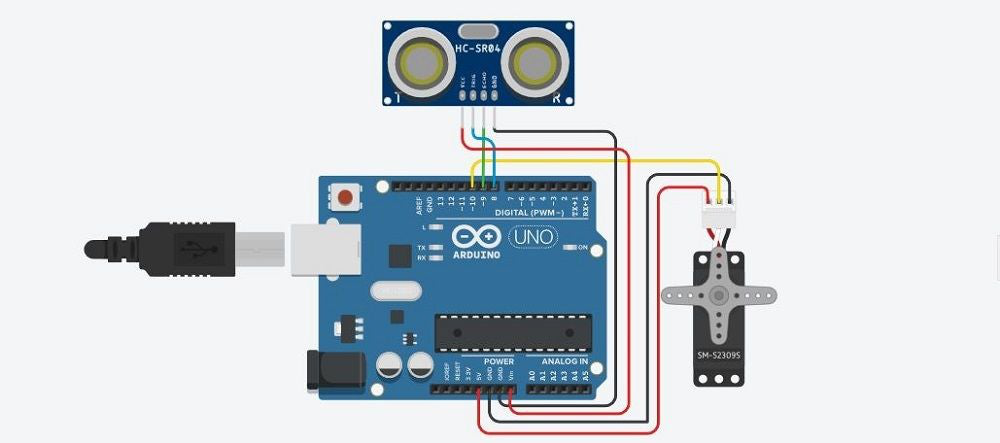
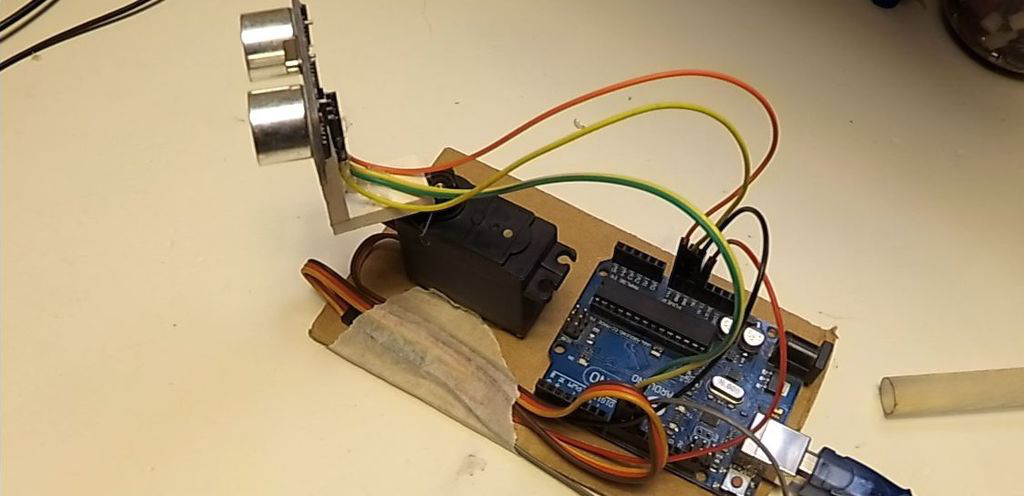
Po podłączeniu czujnika ultradźwiękowego do Arduino, czas podłączyć do niego serwomotor. Ponownie pamiętaj o podłączeniu VCC i GND serwomotoru. Podłącz sygnał serwa do pinu 10 Arduino.
Krok 5: Oprogramowanie wymagane dla radaru Arduino:
Będziesz potrzebował Arduino IDE i Processing IDE, aby uruchomić projekt radarowy.
Przetwarzające IDE otrzyma wartość wysłaną z Arduino i wyjaśni obszar docelowy (czerwony znak). Kliknij link, aby je pobrać.
Przetwarzanie IDE: https://processing.org/download/support.html
Arduino IDE: https://www.arduino.cc/en/main/software
Krok 6: Kod Arduino:
#includeconst int Pin wyzwalacza = 8;
stała int EchoPin = 9;
const int motorSignalPin = 10;
const int kąt początkowy = 90;
const int minimalnyKąt = 6;
stała int maksymalnyKąt = 175;
const int prędkość obrotowa = 1;
silnik serwo;
unieważnij konfigurację (unieważnij)
{pinMode(TriggerPin, WYJŚCIE);
tryb pin (EchoPin, WEJŚCIE);
motor.attach (motorSignalPin);
Serial.begin (9600);
pusta pętla (pusta)
{static int motorAngle = kąt początkowy;
statyczny int motorRotateAmount = prędkość obrotowa;
silnik.write (motorAngle);
Opóźnienie (10);
SerialOutput (motorAngle, CalculateDistance());
motorAngle + = motorRotateAmount;
(motorAngle '= minimalnykąt || motorAngle' = maksymalnykąt) {motorRotateAmount = -motorRotateAmount;
int Oblicz odległość (void)
{digitalWrite(TriggerPin, WYSOKI);
opóźnienieMikrosekundy (10);
digitalWrite (TriggerPin, LOW);
długi czas trwania = impulsIn (EchoPin, WYSOKI);
odległość pływaka = czas trwania * 0,017F;
return in (odległość);
void SerialOutput (stała int kąt, stała int odległość)
String angleString = String(kąt);
Odległość ciąguString = Ciąg(odległość);
Serial.println(kątString + ',' + odległośćString);
Krok 7: Obsługuj IDE:
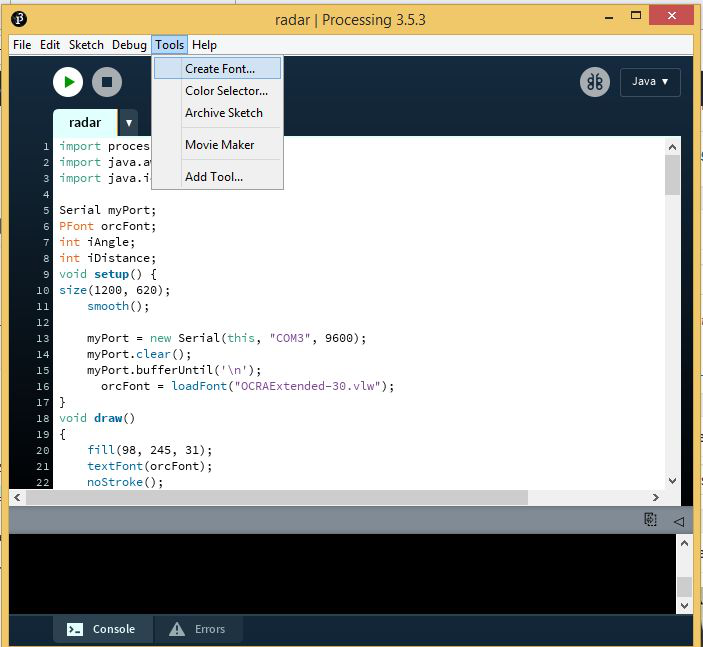
Możemy użyć przetwarzającego IDE, aby łatwo znaleźć dowolny obiekt w zasięgu (40 cm). Jeśli na Twoim komputerze nie ma IDE, pobierz je. Przed użyciem tego IDE musimy skonfigurować czcionkę.
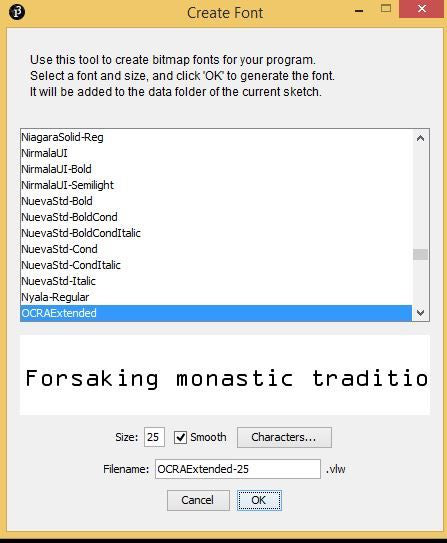
W tym celu musimy zainstalować plik 'OCRAEXT.TTF' znajdujący się w Radar.zip. Następnie przejdź do narzędzi/utwórz czcionkę. Wybierz z listy „OCRAExtended”, wybierz rozmiar czcionki 25 i kliknij „OK”.
Krok 8:
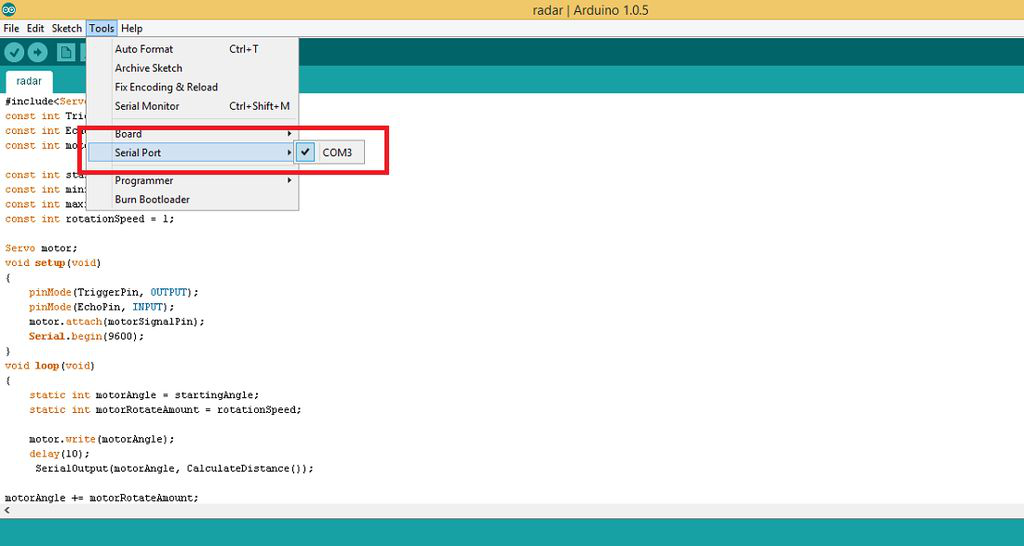
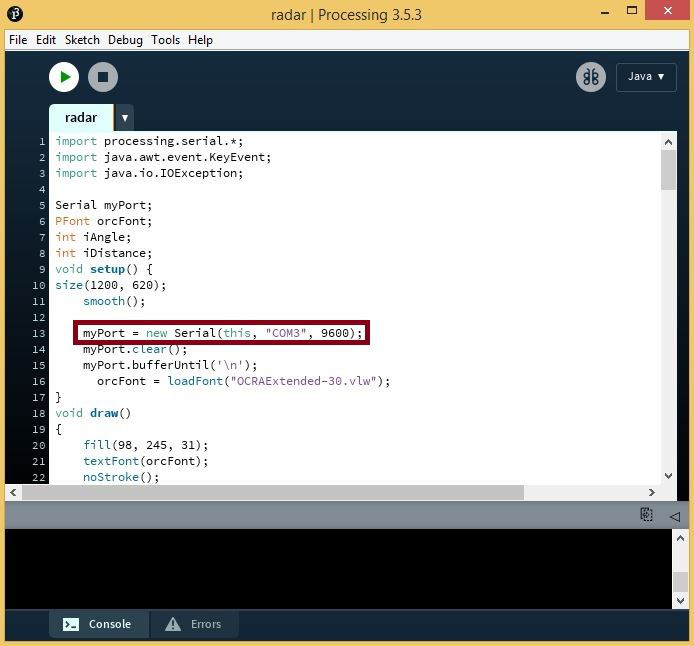
Teraz musimy znaleźć numer portu COM. Przejdź do Arduino IDE i znajdź port Com (COM3 na zdjęciu). Umieść numer portu COM w linii 13 kodu przetwarzającego (COM3 na zdjęciu).
Krok 9:
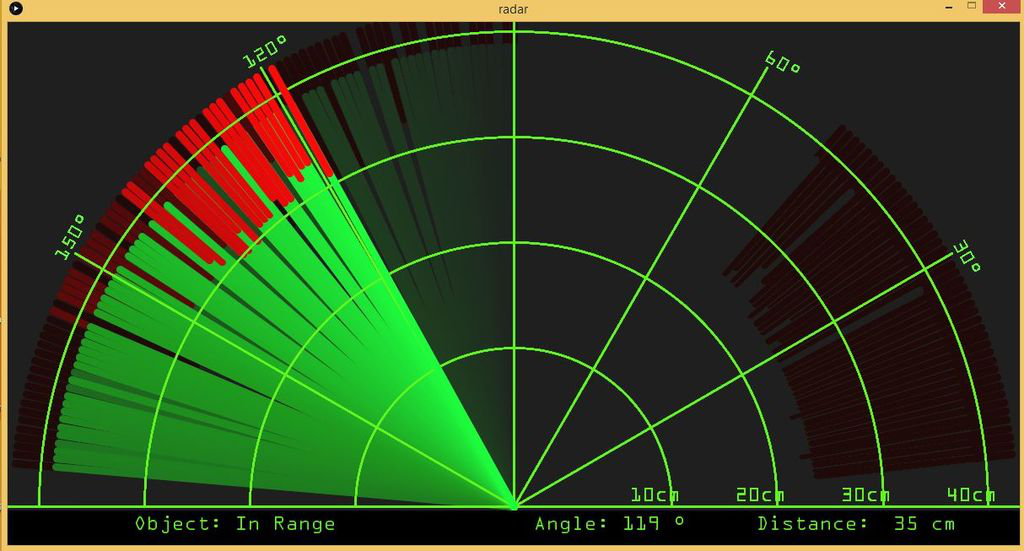
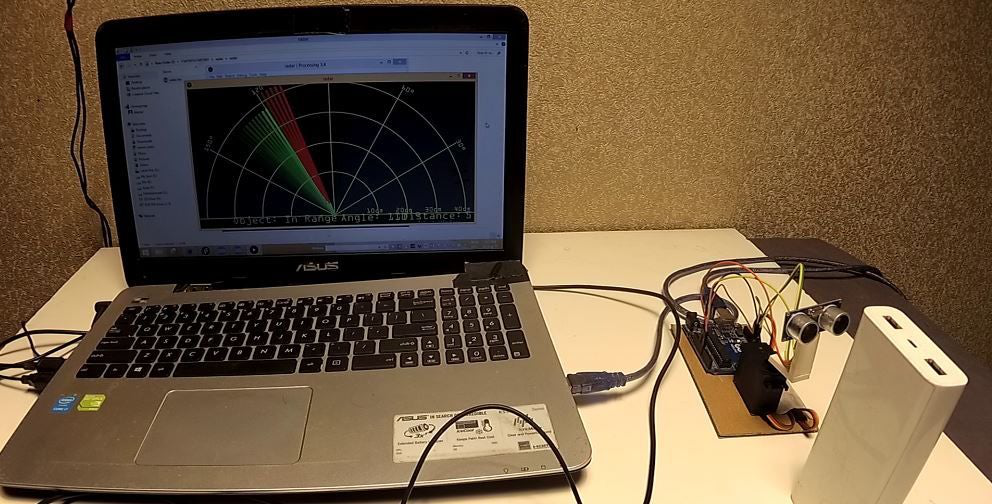
Na koniec naciśnięcie przycisku „Uruchom” spowoduje wyświetlenie okna przetwarzania. Pokaże kąt serwa radaru i odległość od obiektu piezoelektrycznego czujnika ultradźwiękowego.






 Tech Co,.Ltd")