Language



























Pregleda: 17 Autor: Urednik stranice Vrijeme objave: 2020-06-08 Porijeklo: stranica








Komponente ultrazvučnih senzora koje je potrebno navesti kada se koristi ultrazvuk za izradu arduino radara.
Arduino ploča (ja koristim arduino Uno)
Servo motor (mg-996)
Ultrazvučni senzor HC-SR04
BreadboardJumper
1. korak:
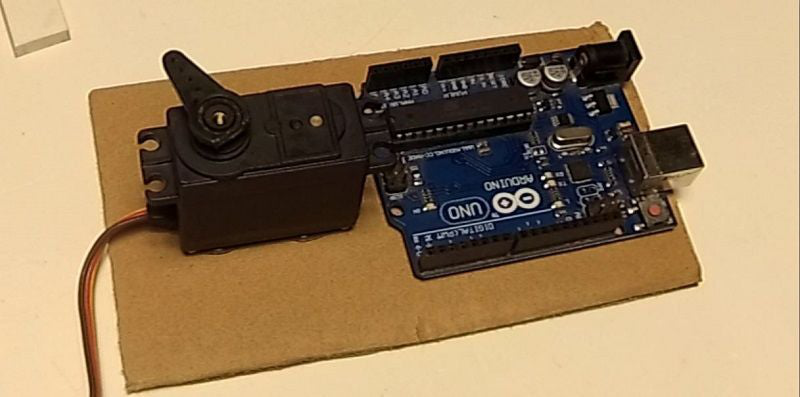
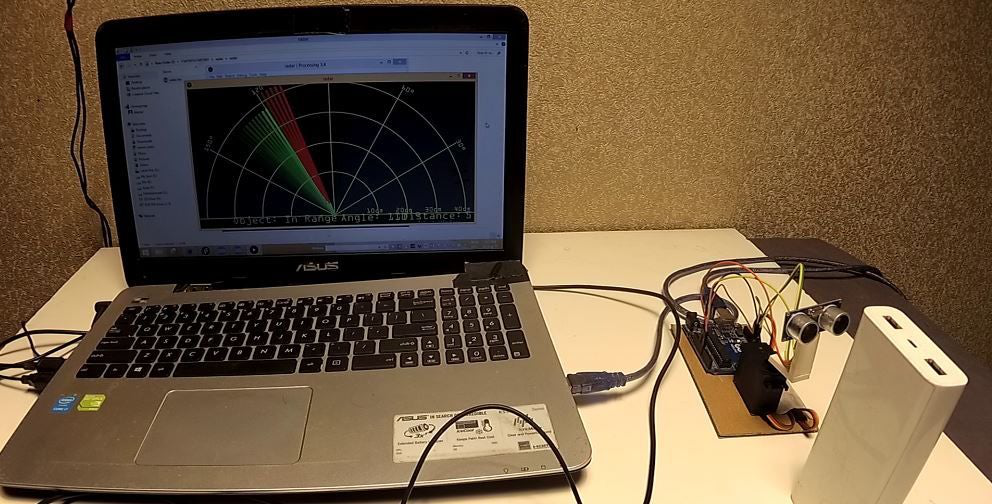
'Prvo moramo izrezati kartonsku ploču (15cm * 8cm). Zatim zalijepiti arduino i servo motor na piezoelektrični ultrazvučni pretvarač
2. korak:
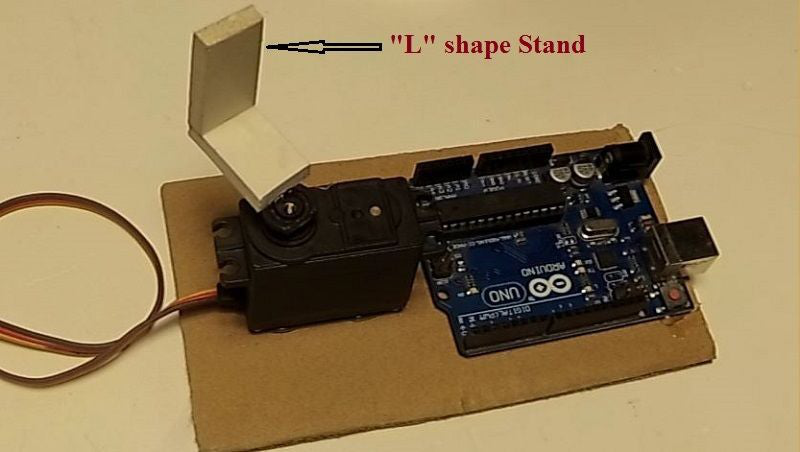
Sada moramo napraviti nosač u obliku slova 'L' za ultrazvučni senzor (HC-SR04) kako bismo ga držali na servo motoru.
3. korak:

Sada moramo spojiti sonarni senzor na arduino. Budite oprezni kada spajate VCC i GND senzora na 5v odnosno GND arduina. Nakon toga spojite trig pin na 8 i echo pin na 9 arduina.
Korak 4:
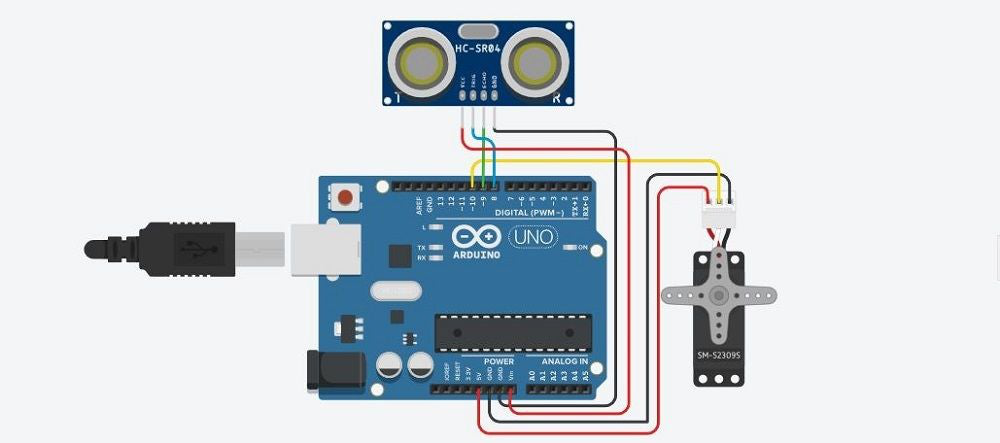
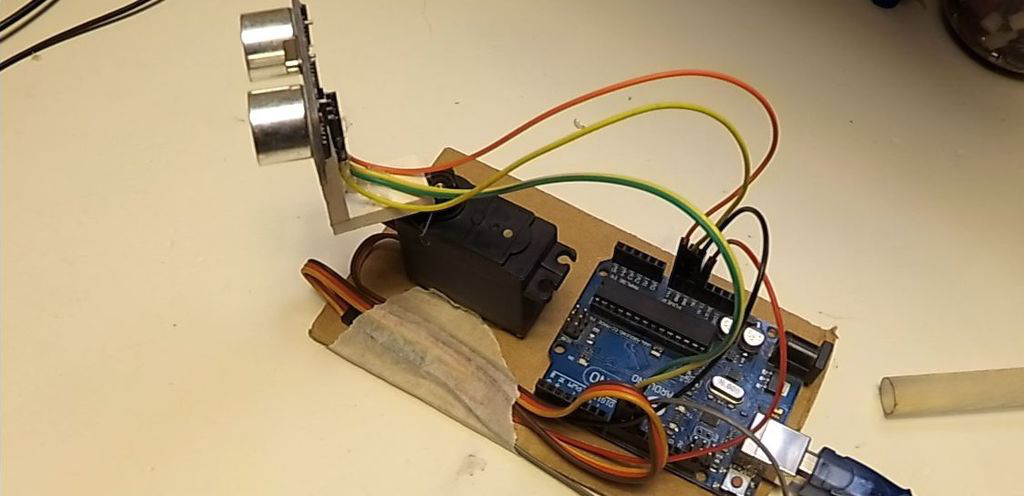
Nakon povezivanja senzora ultrazvučnog pretvarača s arduinom, vrijeme je da na njega spojite servo motor. Opet, pazite da spojite VCC i GND servo motora. Spojite servo signal na pin 10 arduina.
Korak 5: Softver potreban za Arduino radar:
Za pokretanje radarskog projekta trebat će vam arduino IDE i IDE za obradu.
IDE za obradu će dobiti vrijednost poslanu iz arduina i objasniti ciljno područje (crvena oznaka). Slijedite poveznicu da ih preuzmete.
IDE za obradu: https://processing.org/download/support.html
Arduino IDE: https://www.arduino.cc/en/main/software
Korak 6: Arduino kod:
#includeconst int TriggerPin = 8;
const int EchoPin = 9;
const int motorSignalPin = 10;
const int početni kut = 90;
const int minimumAngle = 6;
const int maksimalni kut = 175;
const int rotationSpeed = 1;
servo motor;
void setup (void)
{pinMode(TriggerPin, IZLAZ);
pinMode (EchoPin, INPUT);
motor.attach (motorSignalPin);
Serial.begin (9600);
void petlja (praznina)
{static int motorAngle = početni kut;
static int motorRotateAmount = rotationSpeed;
motor.write (motorAngle);
Odgoda (10);
SerialOutput (motorAngle, CalculateDistance());
motorAngle + = motorRotateAmount;
(kut motora '= minimalni kut || kut motora' = maksimalni kut) {količina rotacije motora = -količina rotacije motora;
int CalculateDistance (void)
{digitalWrite(TriggerPin, HIGH);
kašnjenje u mikrosekundama (10);
digitalni zapis (TriggerPin, LOW);
dugo trajanje = pulseIn (EchoPin, VISOKO);
plovna udaljenost = trajanje * 0,017F;
return int (udaljenost);
void SerialOutput (konst int kut, konst int udaljenost)
String angleString = String(kut);
String distanceString = String(distance);
Serial.println(angleString + ',' + distanceString);
Korak 7: Rukovanje IDE-om:
Možemo koristiti IDE za obradu kako bismo lako pronašli bilo koji objekt unutar dometa (40 cm). Ako na vašem računalu nema IDE, preuzmite ga. Prije korištenja ovog IDE-a, moramo konfigurirati font.
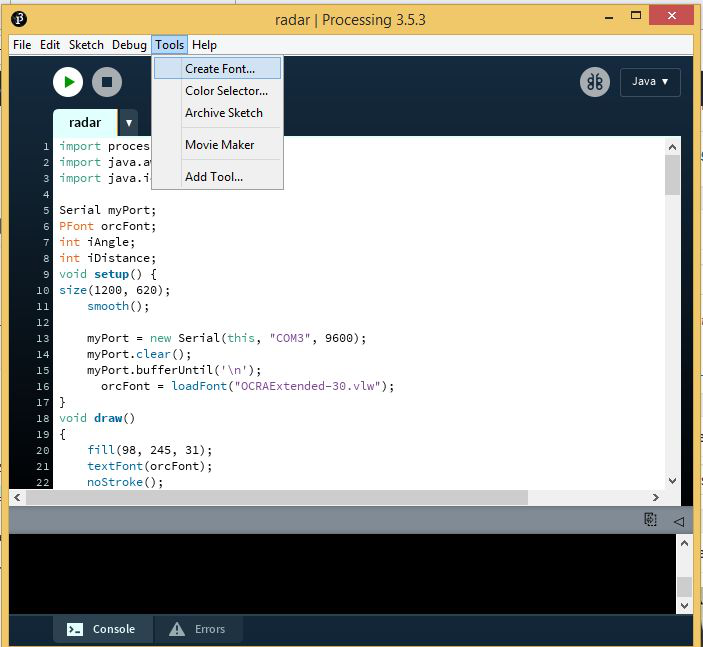
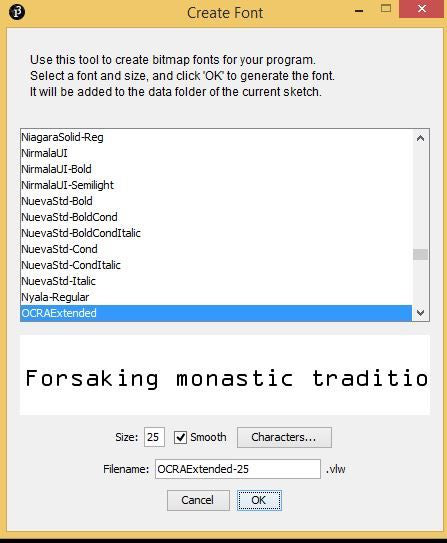
Da bismo to učinili, moramo instalirati datoteku 'OCRAEXT.TTF' koja se nalazi u Radar.zip. Zatim idite na alate/stvori font. Odaberite 'OCRAExtended' s popisa, odaberite veličinu fonta 25 i kliknite 'OK'.
Korak 8:
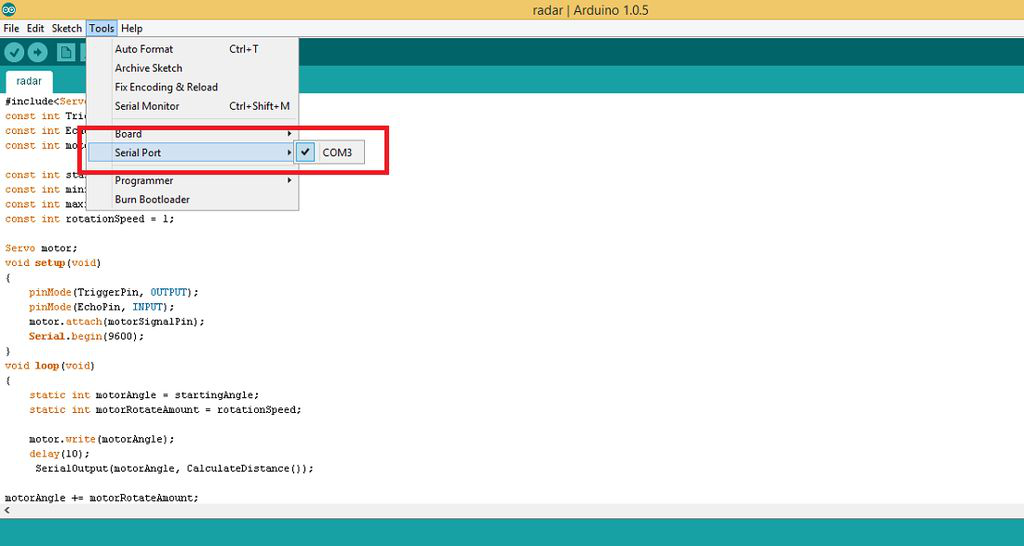
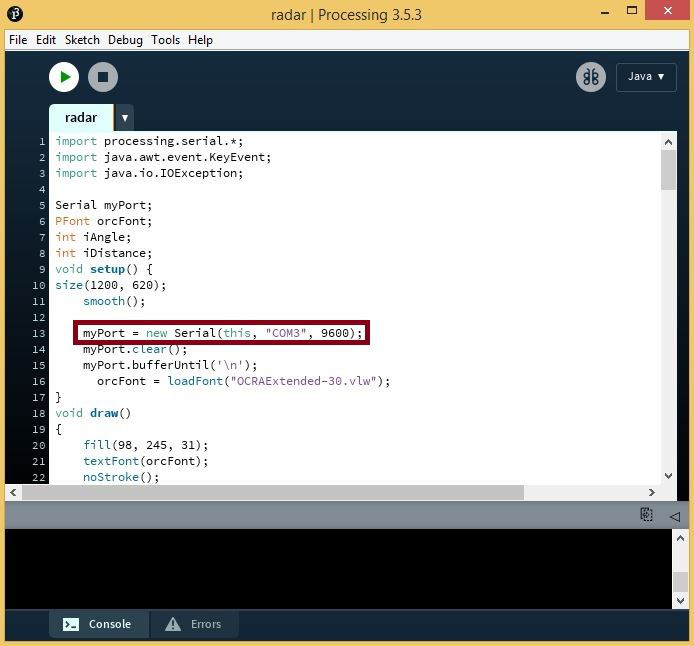
Sada moramo pronaći broj COM porta. Idite na Arduino IDE i pronađite Com port (COM3 na fotografiji). Postavite broj COM porta u redak 13 koda za obradu (COM3 na fotografiji).
9. korak:
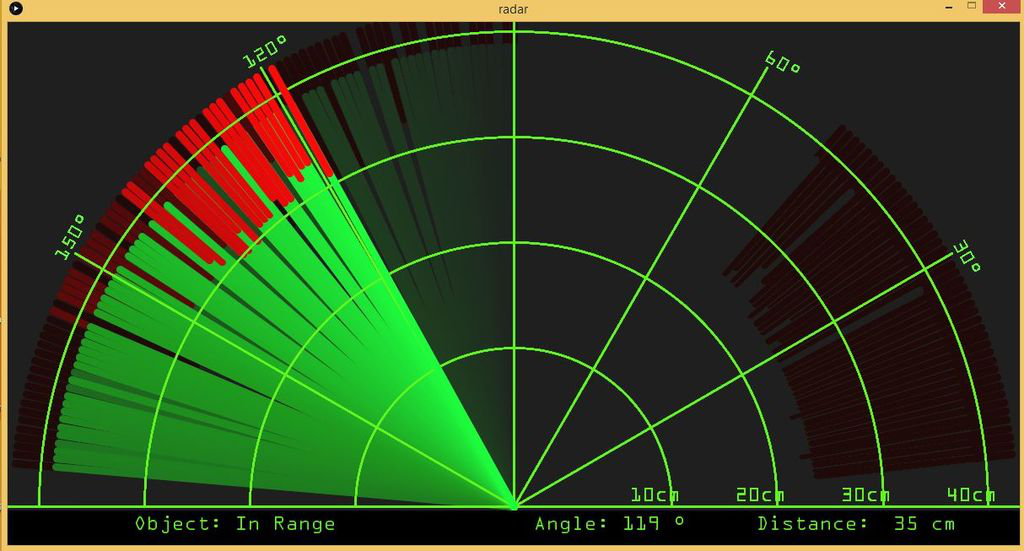
Na kraju, pritiskom na gumb 'Pokreni' prikazat će se prozor za obradu. Prikazat će radarski servo kut i udaljenost objekta senzora piezoelektričnog ultrazvučnog pretvarača.






 Tech Co,.Ltd")