Language



























Radhairc: 17 Údar: Eagarthóir Suímh Am Foilsithe: 2020-06-08 Bunús: Suíomh








Na braiteoirí ultrasonaic a chomhdhéanann í a liostú nuair a úsáidtear ultrasonaic chun radar arduino a dhéanamh.
Bord Arduino (úsáidim arduino Uno)
mótair servo (mg-996)
Braiteoir ultrasonaic HC-SR04
Geansaí Arán
Céim 1:
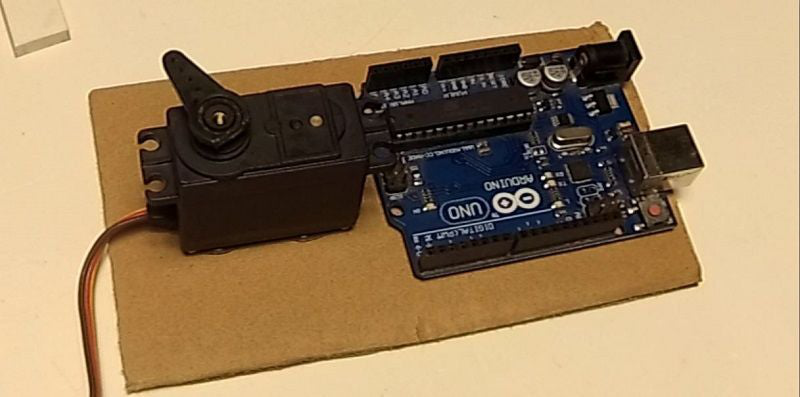
'Ar dtús, ní mór dúinn bord cárta a ghearradh (15cm * 8cm). Ansin, gliú an mótar arduino agus servo ar thrasduchtóir ultrasonaic piezoelectric
Céim 2:
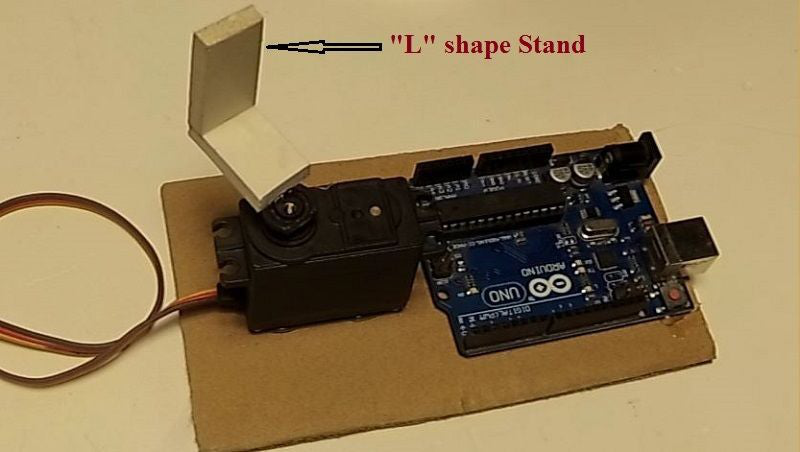
Anois, ní mór dúinn lúibín múnlaithe “L” a dhéanamh don braiteoir ultrasonaic (HC-SR04) chun é a choinneáil ar an mótar servo.
Céim 3:

Anois, ní mór dúinn an braiteoir sonar a nascadh leis an arduino. Bí cúramach nuair atá VCC agus GND an braiteora á nascadh le 5v agus GND arduino, faoi seach. Tar éis sin, ceangail an bioráin trig go 8 agus an bioráin macalla go 9 arduino.
Céim 4:
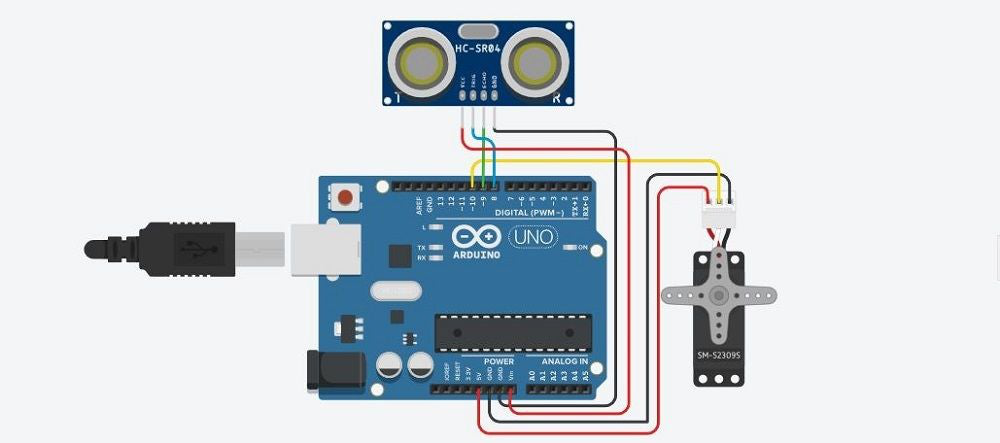
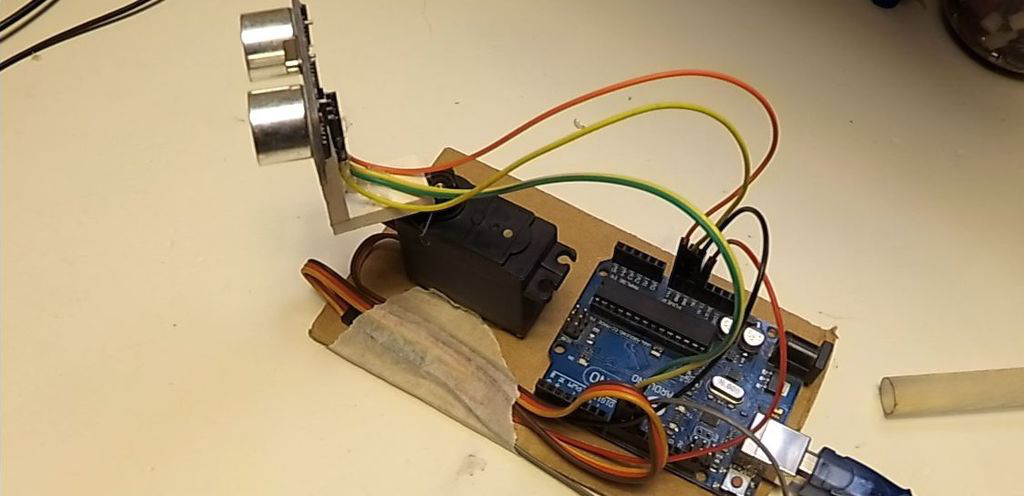
Tar éis an braiteoir trasducer ultrasonaic a nascadh leis an arduino, tá sé in am an mótar servo a nascadh leis. Arís, bí cúramach an VCC agus GND an mhótair servo a nascadh. Ceangail an comhartha servo le bioráin 10 de arduino.
Céim 5: Bogearraí atá ag teastáil le haghaidh radar Arduino:
Beidh ort arduino IDE agus Próiseáil IDE chun é a reáchtáil tionscadal radair.
Gheobhaidh IDE próiseála an luach a sheoltar ó arduino agus míneoidh sé an limistéar sprice (marc dearg). Lean an nasc chun iad a íoslódáil.
Próiseáil IDE: https://processing.org/download/support.html
IDE Arduino: https://www.arduino.cc/ga/main/software
Céim 6: Cód Arduino:
#includeconst int TriggerPin = 8;
const int EchoPin = 9;
const int motorSignalPin = 10;
const int startingAngle = 90;
const int minimumAngle = 6;
const int maximumAngle = 175;
const int rotationSpeed = 1;
mótair servo;
socrú folús (folamh)
{pinMode(TriggerPin, OUTPUT);
pinMode (EchoPin, INPUT);
motor.attach (motorSignalPin);
sraitheach.begin (9600);
lúb ar neamhní (folamh)
{static in motorAngle = ag tosú Uillinn;
mótar slánuimhir statachRotateAmount = Luas rothlaithe;
motor.write (motorAngle);
Moill (10);
Aschur Srathach (mótair Uillinn, Fad Ríomh());
motorAngle + = motorRotateAmount;
(motorAngle '= minimumAngle || motorAngle' = maximumAngle) {motorRotateAmount = -motorRotateAmount;
in ríomh Fad (folamh)
{digitalWrite(TriggerPin, ARD);
moill Micreathonnta (10);
digitalWrite (TriggerPin, ÍSEAL);
ré fada = pulseIn (EchoPin, HIGH);
achar snámhphointe = ré * 0.017F;
filleadh int (achar);
Aschur Srathach neamhní (const uillinn, fad iomlán)
Teaghrán angleString = Teaghrán(uillinn);
Teaghrán distanceString = Teaghrán(achar);
Serial.println(angleString + ',' + distanceString);
Céim 7: Láimhseáil an IDE:
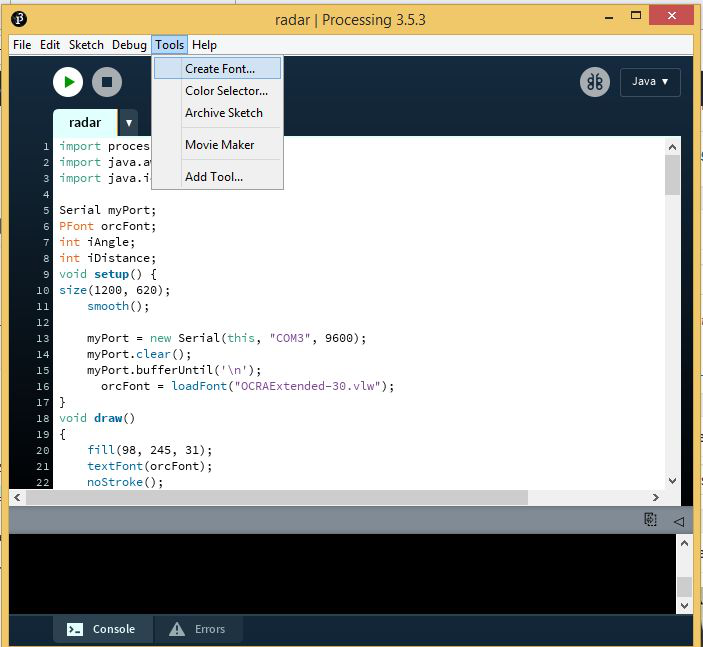
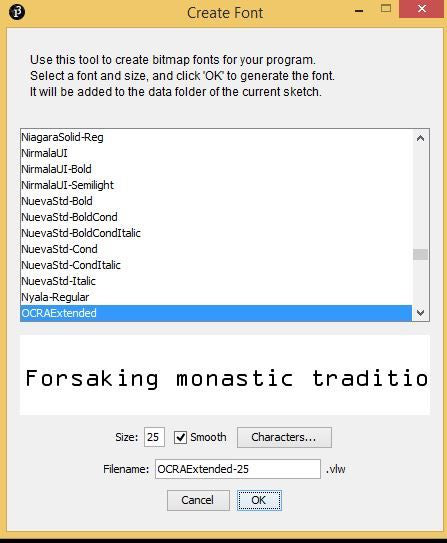
Is féidir linn an IDE próiseála a úsáid chun aon rud laistigh den raon (40 cm) a aimsiú go héasca. Mura bhfuil IDE ar do ríomhaire, déan é a íoslódáil. Sula n-úsáidfimid an IDE seo, ní mór dúinn an cló a chumrú.
Chun seo a dhéanamh, ní mór dúinn an comhad 'OCRAEXT.TTF' atá suite i Radar.zip a shuiteáil. Ansin, téigh go dtí Uirlisí / cruthaigh Cló. Roghnaigh 'OCRAExtended' ón liosta, roghnaigh clómhéid 25 agus cliceáil 'OK'.
Céim 8:
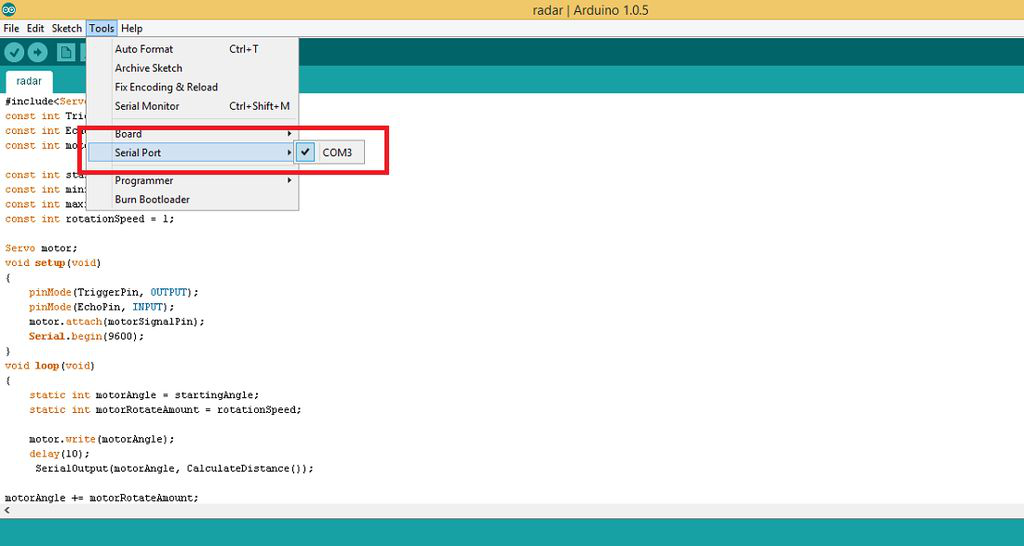
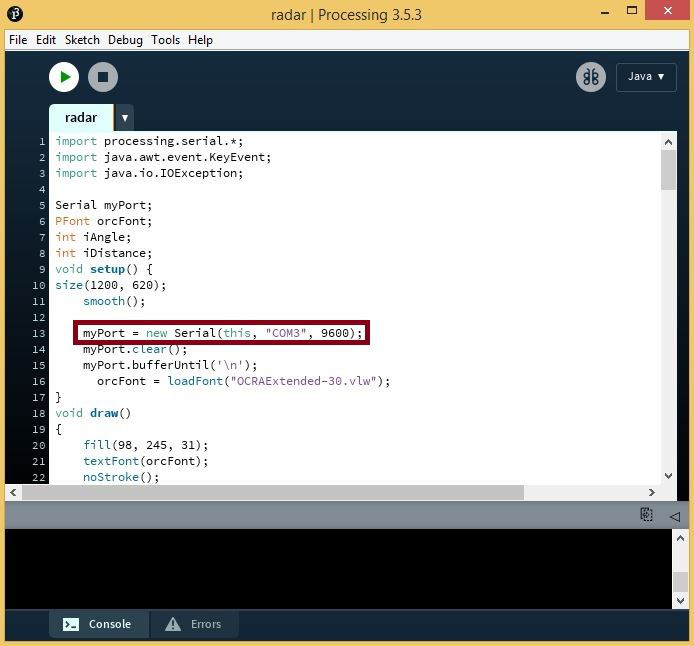
Anois, ní mór dúinn uimhir an chalafoirt COM a aimsiú. Téigh go dtí an Arduino IDE agus aimsigh an port Com (COM3 sa ghrianghraf). Cuir uimhir an chalafoirt COM ar líne 13 den chód próiseála (COM3 sa ghrianghraf).
Céim 9:
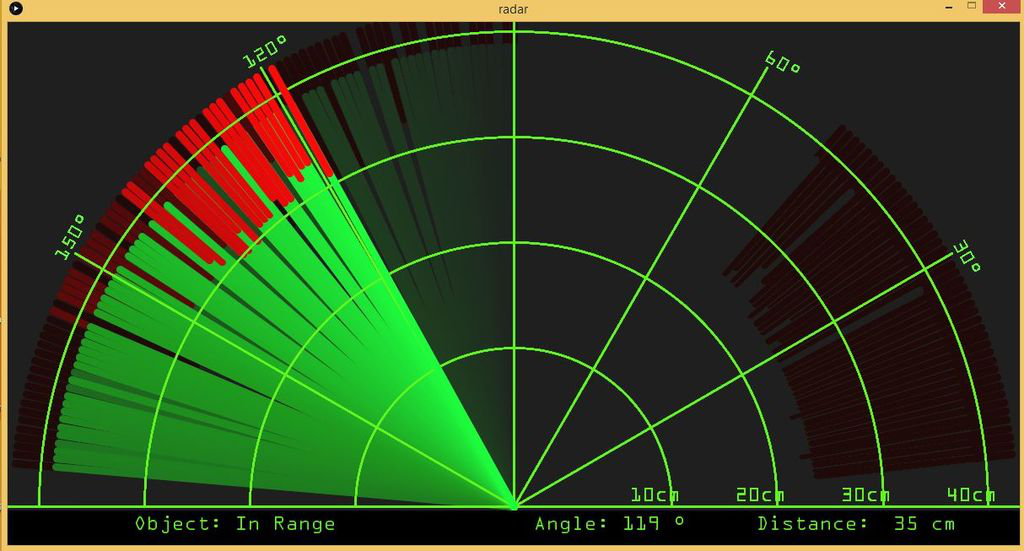
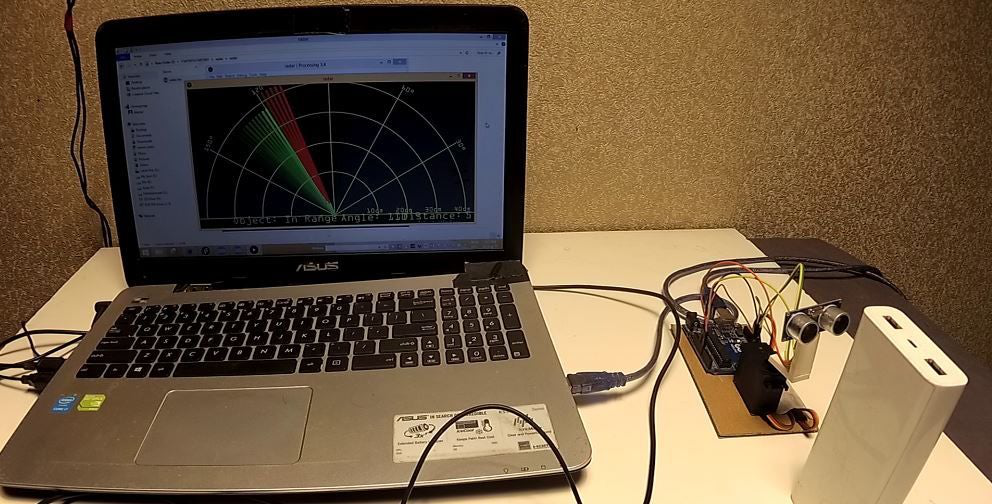
Ar deireadh, má bhrúnn tú an cnaipe 'Rith' taispeánfar fuinneog phróiseála. Taispeánfaidh sé uillinn servo an radair agus fad an oibiachta den braiteoir trasduchtóra ultrasonaic piezoelectric.






 Tech Co,.Ltd")