Language



























Прагляды: 17 Аўтар: Рэдактар сайта Час публікацыі: 2020-06-08 Паходжанне: Сайт








Кампаненты ультрагукавых датчыкаў, якія неабходна пералічыць пры выкарыстанні ультрагуку для стварэння радара Arduino.
Плата Arduino (я выкарыстоўваю Arduino Uno)
Серварухавік (mg-996)
Ультрагукавой датчык HC-SR04
BreadboardJumper
Крок 1:
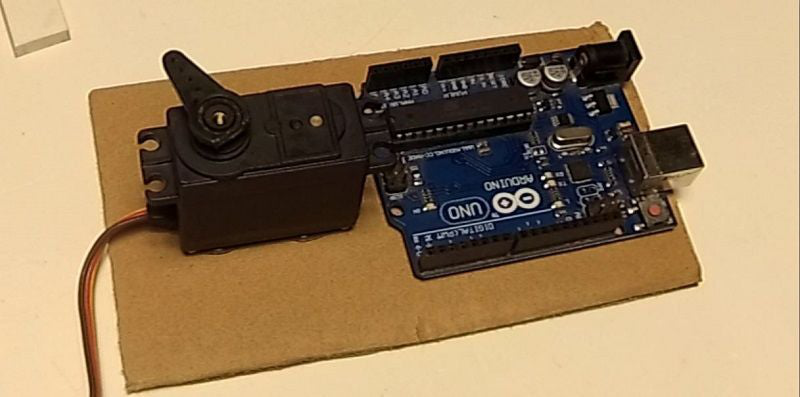
'Спачатку мы павінны выразаць кардон (15 см * 8 см). Затым прыляпіце arduino і серварухавік да п'езаэлектрычнага ультрагукавога пераўтваральніка
Крок 2:
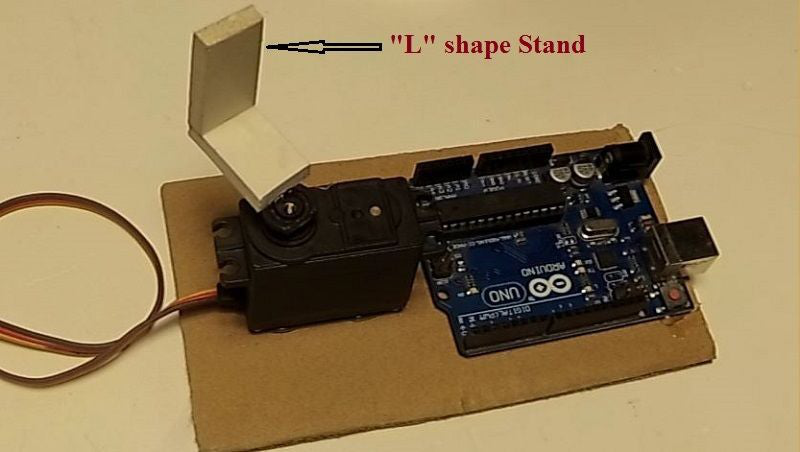
Цяпер мы павінны зрабіць L-вобразны кранштэйн для ультрагукавога датчыка (HC-SR04), каб трымаць яго на серварухавіку.
Крок 3:

Цяпер мы павінны падключыць датчык гідралакатара да Arduino. Будзьце асцярожныя, калі падключаеце VCC і GND датчыка да 5v і GND arduino адпаведна. Пасля гэтага падключыце штыфт трыгера да 8, а штыфт рэха - да 9 arduino.
Крок 4:
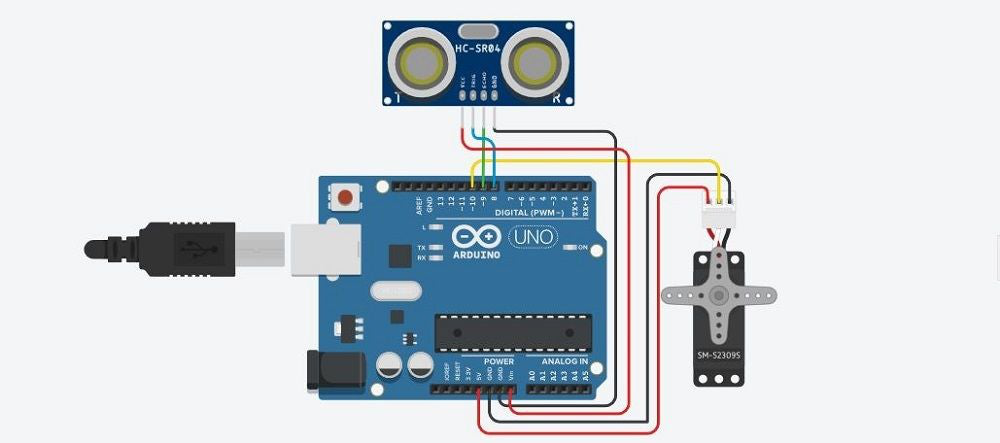
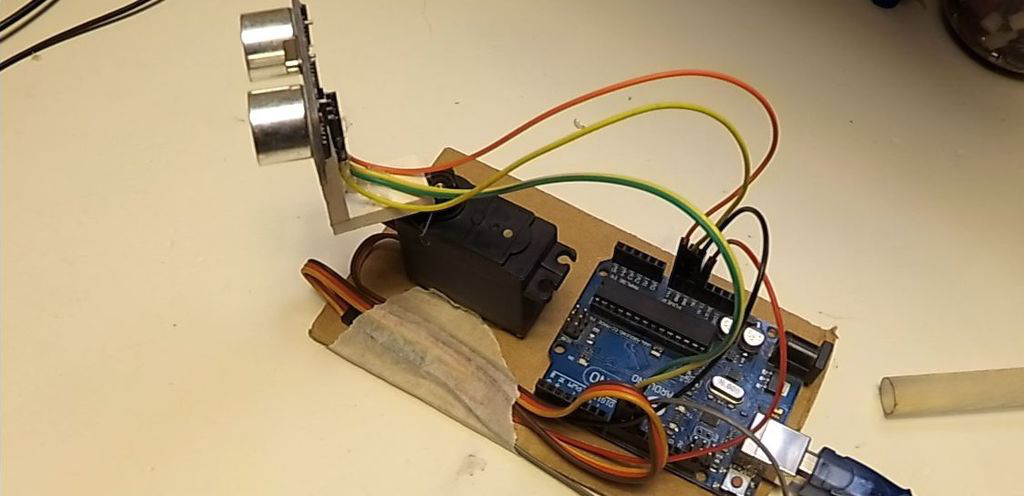
Пасля падлучэння датчыка ультрагукавога пераўтваральніка да Arduino прыйшоў час падключыць да яго серварухавік. Зноў жа, будзьце асцярожныя, каб падключыць VCC і GND серводвигателя. Падключыце сігнал сервопривода да кантакту 10 Arduino.
Крок 5: праграмнае забеспячэнне, неабходнае для радара Arduino:
Каб запусціць радарны праект, вам спатрэбіцца arduino IDE і Processing IDE .
Апрацоўка IDE атрымае значэнне, адпраўленае з Arduino, і растлумачыць мэтавую вобласць (чырвоная адзнака). Перайдзіце па спасылцы, каб загрузіць іх.
Апрацоўка IDE: https://processing.org/download/support.html
Arduino IDE: https://www.arduino.cc/en/main/software
Крок 6: Код Arduino:
#includeconst int TriggerPin = 8;
const int EchoPin = 9;
const int motorSignalPin = 10;
const int пачатковы вугал = 90;
const int minimumAngle = 6;
const int maximumAngle = 175;
const int rotationSpeed = 1;
серводвигатель;
несапраўдная ўстаноўка (пустая)
{pinMode(TriggerPin, ВЫХОД);
pinMode (EchoPin, INPUT);
motor.attach (motorSignalPin);
Serial.begin (9600);
пустата пятля (пустата)
{static int motorAngle = пачатковы кут;
static int motorRotateAmount = rotationSpeed;
motor.write (motorAngle);
Затрымка (10);
SerialOutput (motorAngle, CalculateDistance());
motorAngle + = motorRotateAmount;
(motorAngle '= мінімальны вугал || motorAngle' = максімальны вугал) {motorRotateAmount = -motorRotateAmount;
int CalculateDistance (несапраўдны)
{digitalWrite(TriggerPin, HIGH);
затрымка мікрасекунд (10);
digitalWrite (TriggerPin, LOW);
доўгая працягласць = pulseIn (EchoPin, HIGH);
адлегласць паплаўка = працягласць * 0,017F;
return int (адлегласць);
void SerialOutput (const int кут, const int адлегласць)
Радок angleString = Радок(кут);
Радок distanceString = Радок(адлегласць);
Serial.println(angleString + ',' + distanceString);
Крок 7: апрацоўка IDE:
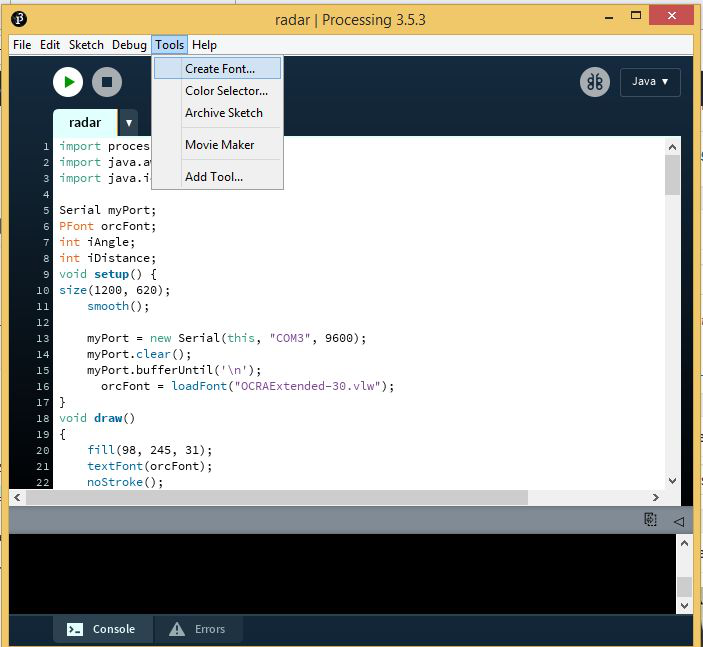
Мы можам выкарыстоўваць IDE для апрацоўкі, каб лёгка знайсці любы аб'ект у дыяпазоне (40 см). Калі на вашым кампутары няма IDE, спампуйце яго. Перш чым выкарыстоўваць гэтую IDE, мы павінны наладзіць шрыфт.
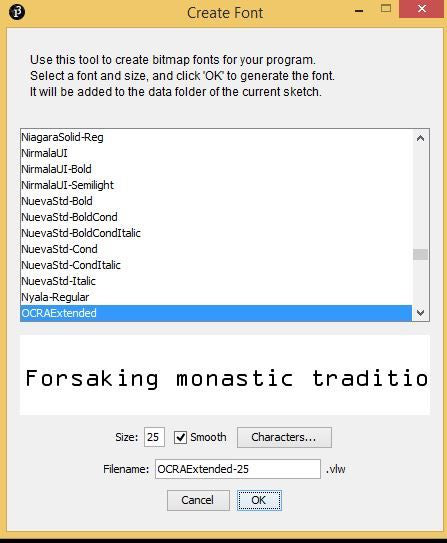
Каб зрабіць гэта, мы павінны ўсталяваць файл 'OCRAEXT.TTF', які знаходзіцца ў Radar.zip. Затым перайдзіце да інструментаў / стварыць шрыфт. Выберыце 'OCRAExtended' са спісу, абярыце памер шрыфта 25 і націсніце 'ОК'.
Крок 8:
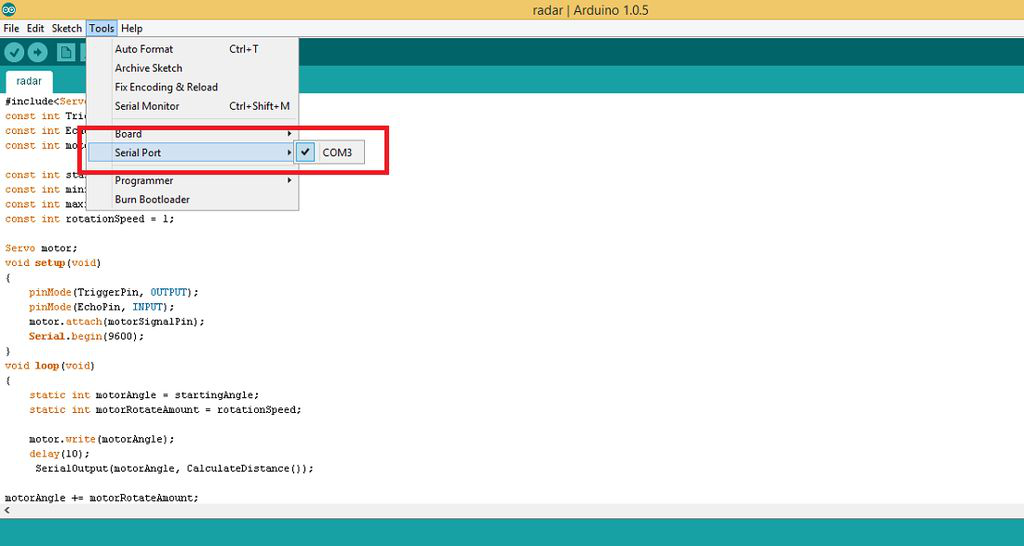
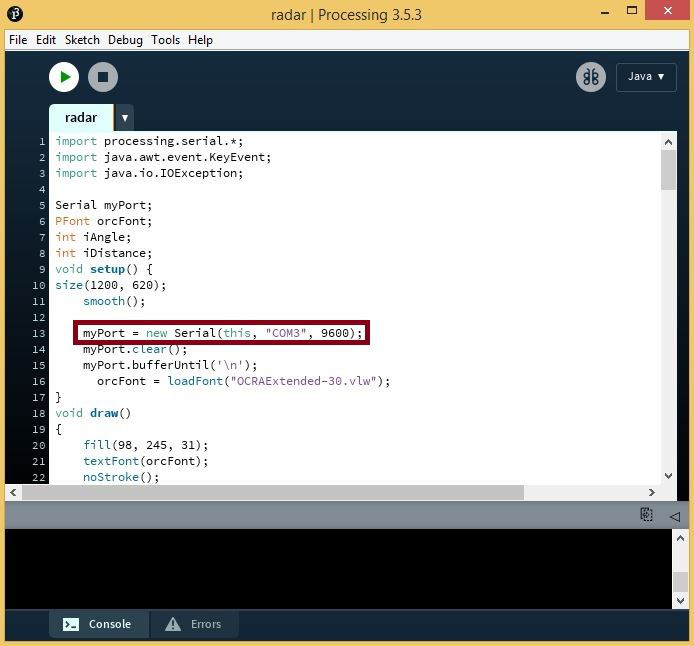
Цяпер мы павінны знайсці нумар COM-порта. Перайдзіце ў IDE Arduino і знайдзіце порт Com (COM3 на фота). Змесціце нумар COM-порта ў радок 13 кода апрацоўкі (COM3 на фота).
Крок 9:
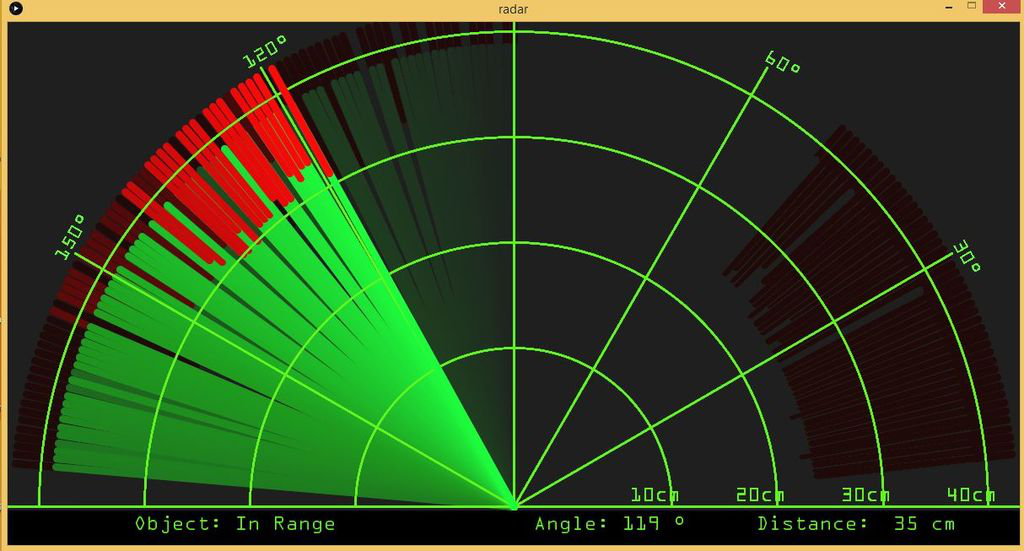
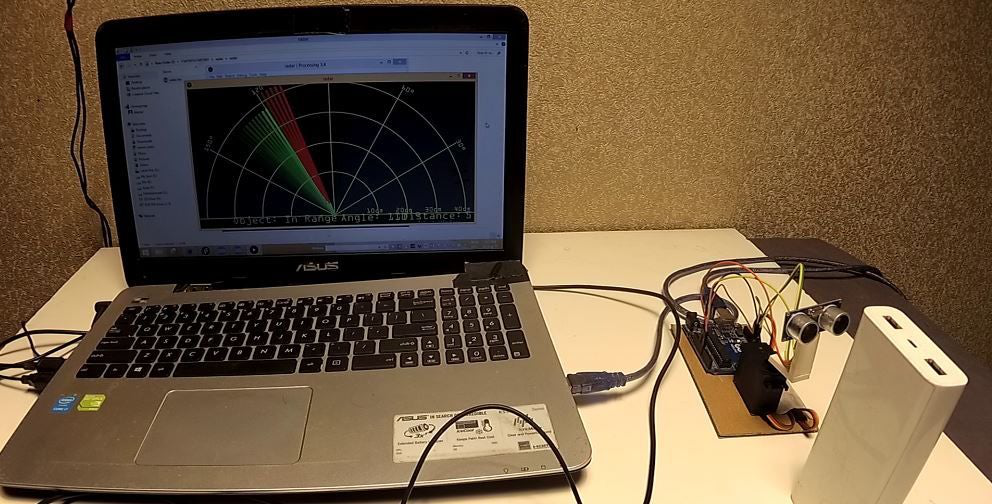
Нарэшце, націсканне кнопкі 'Выканаць' адлюструе акно апрацоўкі. Ён будзе паказваць радарны вугал і адлегласць да аб'екта п'езаэлектрычнага ультрагукавога датчыка.






 Tech Co,.Ltd")