Language



























Visninger: 17 Forfatter: Webstedsredaktør Udgivelsestid: 2020-06-08 Oprindelse: websted








De komponent -ultralydssensorer , der skal opføres, når de bruger ultralyd til at lave arduino-radar.
Arduino Board (jeg bruger arduino Uno)
Servomotor (mg-996)
HC-SR04 ultralydssensor
Breadboard Jumper
Trin 1:
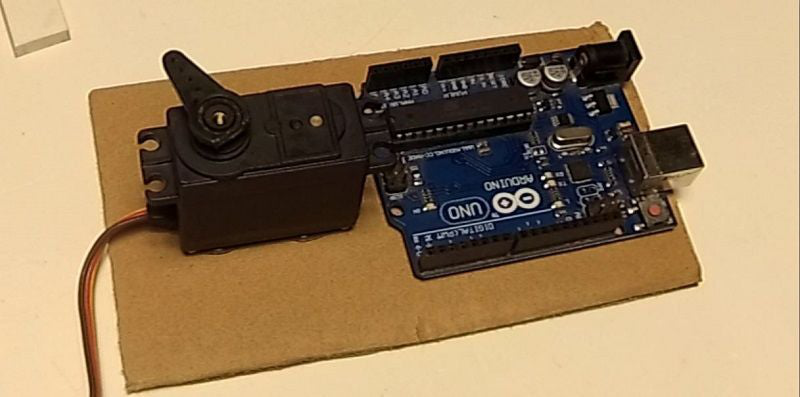
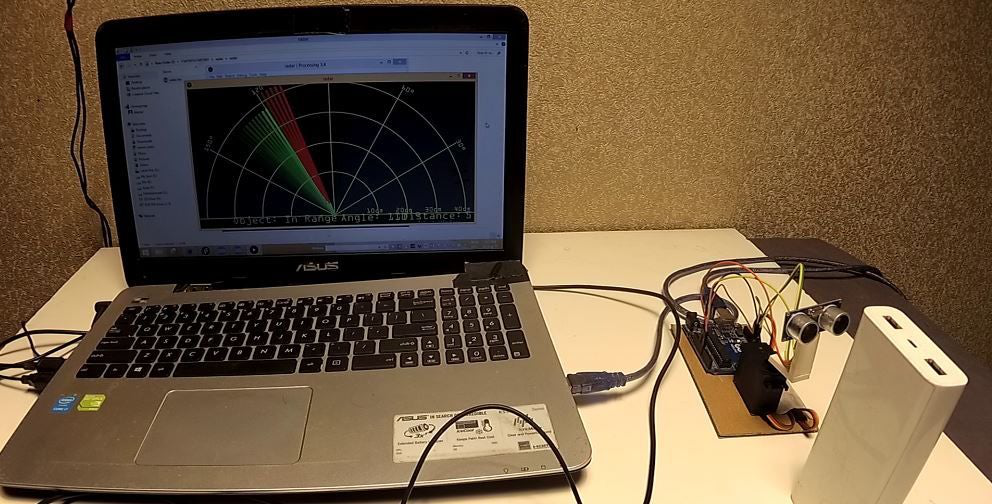
'Først skal vi skære et karton (15 cm * 8 cm). Lim derefter arduino- og servomotoren på en piezoelektrisk ultralydstransducer
Trin 2:
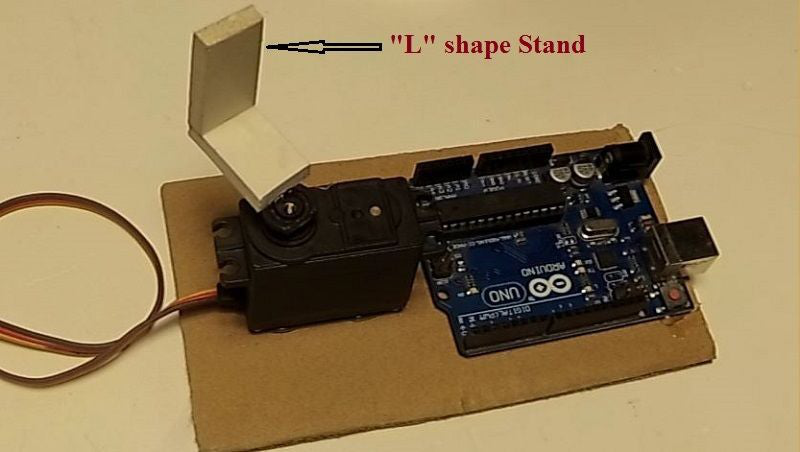
Nu skal vi lave et 'L'-formet beslag til ultralydssensoren (HC-SR04) for at holde det på servomotoren.
Trin 3:

Nu skal vi forbinde sonarsensoren til arduinoen. Vær forsigtig, når du forbinder sensorens VCC og GND til henholdsvis 5v og GND på arduino. Tilslut derefter trig-pinden til 8 og ekko-pinden til 9 på arduino.
Trin 4:
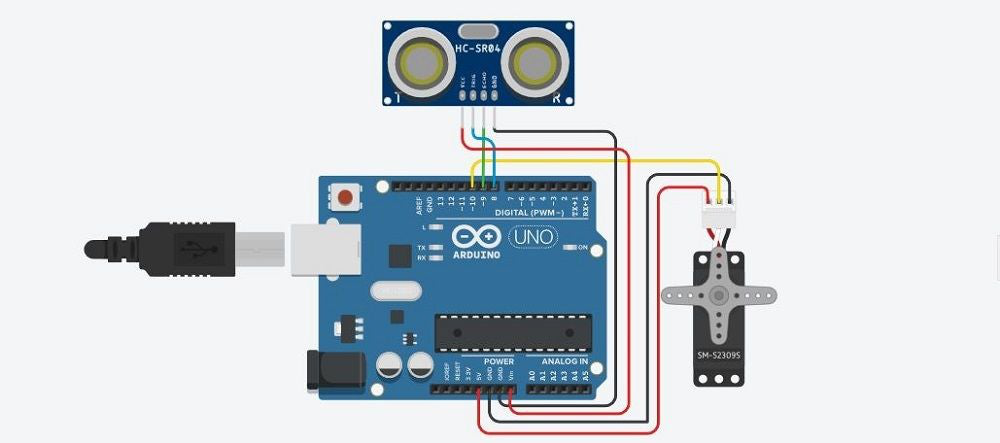
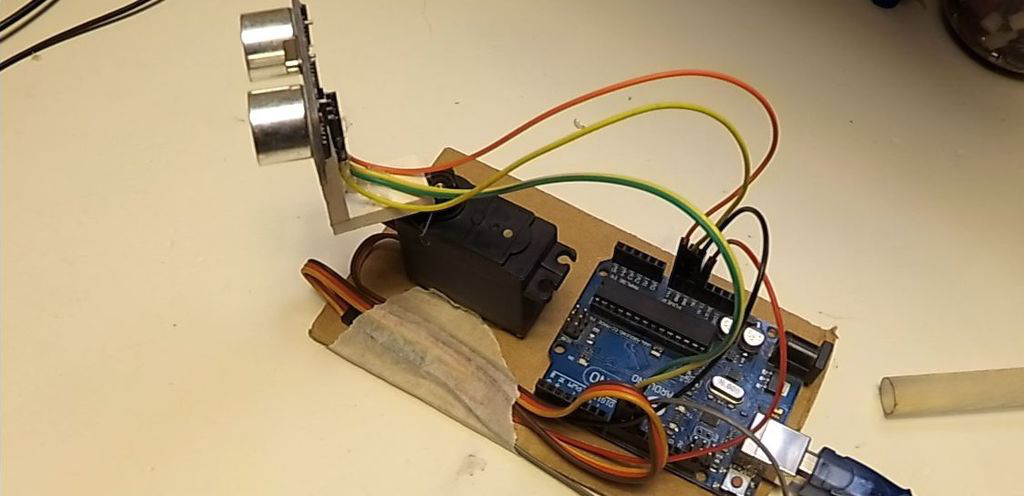
Efter at have tilsluttet ultralydstransducersensoren til arduinoen, er det tid til at tilslutte servomotoren til den. Igen, vær forsigtig med at forbinde VCC og GND på servomotoren. Tilslut servosignalet til pin 10 på arduino.
Trin 5: Software nødvendig til Arduino radar:
Du skal bruge arduino IDE og Processing IDE for at køre dets radarprojekt .
Behandling af IDE vil få værdien sendt fra arduino og forklare målområdet (rødt mærke). Følg linket for at downloade dem.
Behandler IDE: https://processing.org/download/support.html
Arduino IDE: https://www.arduino.cc/en/main/software
Trin 6: Arduino-kode:
#includeconst int TriggerPin = 8;
const int EchoPin = 9;
const int motorSignalPin = 10;
const int startAngle = 90;
const int minimumAngle = 6;
const int maximumAngle = 175;
const int rotationSpeed = 1;
servomotor;
ugyldig opsætning (ugyldig)
{pinMode(TriggerPin, OUTPUT);
pinMode (EchoPin, INPUT);
motor.attach (motorSignalPin);
Serial.begin (9600);
void loop (void)
{static int motorAngle = startAngle;
statisk int motorRotateAmount = rotationSpeed;
motor.write (motorAngle);
Forsinkelse (10);
SerialOutput (motorAngle, CalculateDistance());
motorAngle + = motorRotateAmount;
(motorAngle '= minimumAngle || motorAngle' = maximumAngle) {motorRotateAmount = -motorRotateAmount;
int CalculateDistance (ugyldig)
{digitalWrite(TriggerPin, HIGH);
forsinkelse Mikrosekunder (10);
digitalWrite (TriggerPin, LOW);
lang varighed = pulseIn (EchoPin, HIGH);
flydeafstand = varighed * 0,017F;
retur int (afstand);
void SerialOutput (konst int vinkel, konstant int afstand)
String angleString = String(angle);
String distanceString = String(distance);
Serial.println(angleString + ',' + distanceString);
Trin 7: Håndter IDE:
Vi kan bruge behandlings-IDE til nemt at finde ethvert objekt inden for området (40 cm). Hvis der ikke er nogen IDE på din pc, skal du downloade den. Før vi bruger denne IDE, skal vi konfigurere skrifttypen.
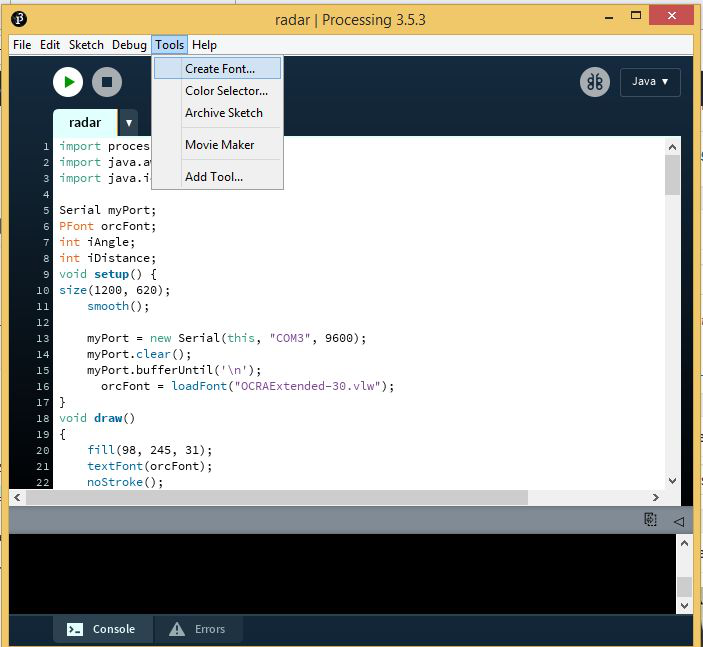
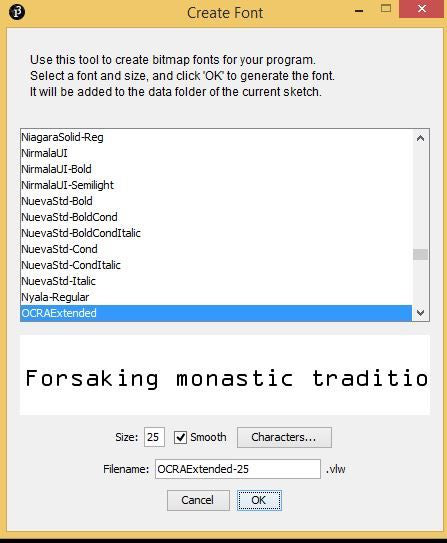
For at gøre dette skal vi installere filen 'OCRAEXT.TTF' i Radar.zip. Gå derefter til værktøjer/opret skrifttype. Vælg 'OCRAExtended' fra listen, vælg en skriftstørrelse på 25 og klik på 'OK'.
Trin 8:
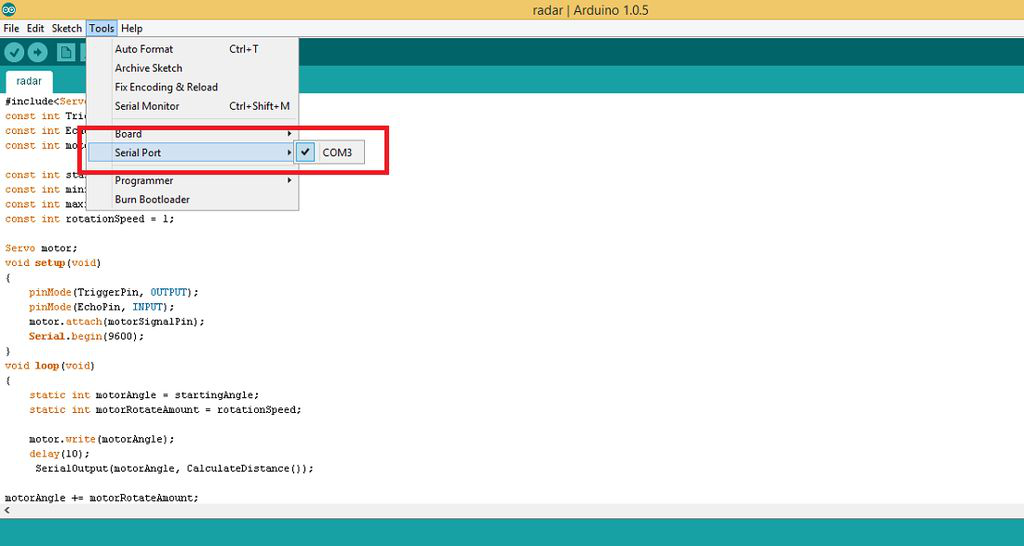
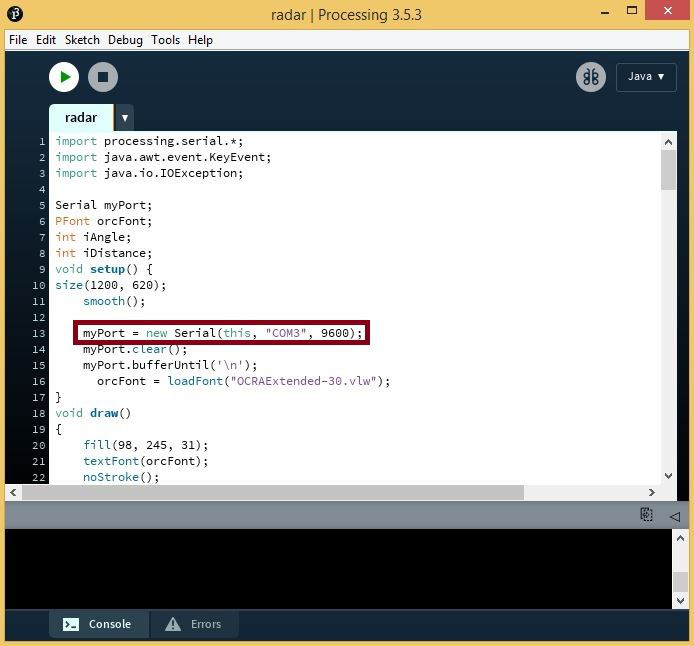
Nu skal vi finde COM-portnummeret. Gå til Arduino IDE og find Com-porten (COM3 på billedet). Placer COM-portnummeret på linje 13 i behandlingskoden (COM3 på billedet).
Trin 9:
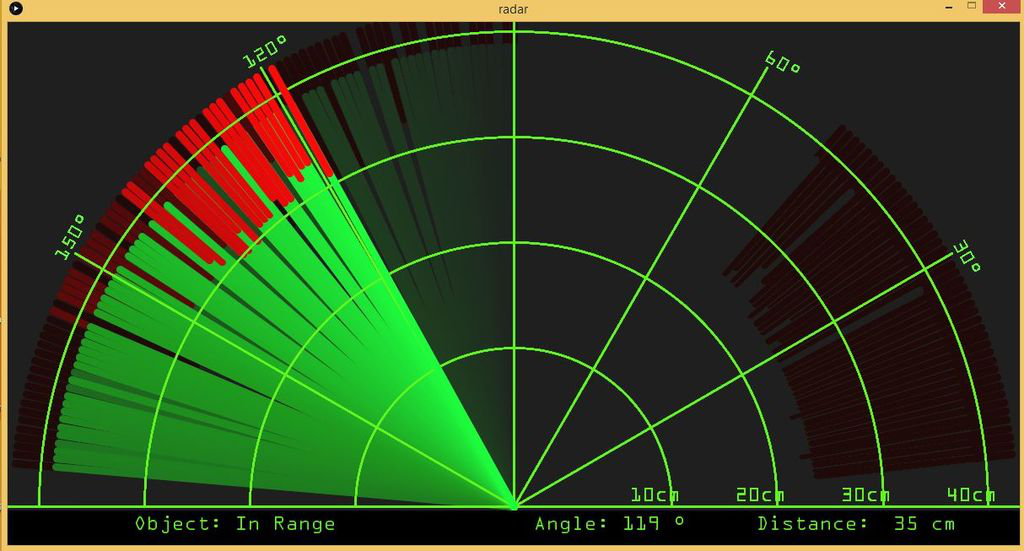
Til sidst, tryk på 'Kør'-knappen vil vise et behandlingsvindue. Den vil vise radarservovinklen og objektafstanden for den piezoelektriske ultralydstransducersensor.






 Tech Co,.Ltd")