Language



























Dilihat: 17 Penulis: Editor Situs Waktu Publikasi: 08-06-2020 Asal: Lokasi








Komponen sensor ultrasonik yang perlu dicantumkan pada saat menggunakan ultrasonik untuk membuat radar arduino.
Papan Arduino (Saya menggunakan Arduino Uno)
Motor servo (mg-996)
Sensor ultrasonik HC-SR04
Papan Tempat Memotong RotiJumper
Langkah 1:
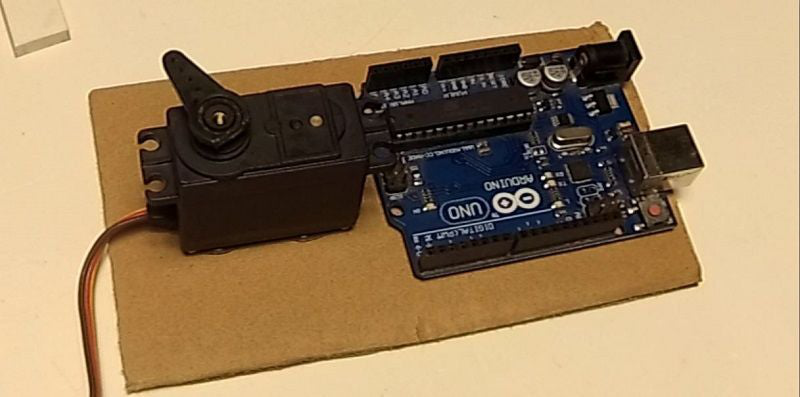
'Pertama, kita harus memotong papan kartu (15cm * 8cm). Kemudian, rekatkan arduino dan motor servo pada transduser ultrasonik piezoelektrik
Langkah 2:
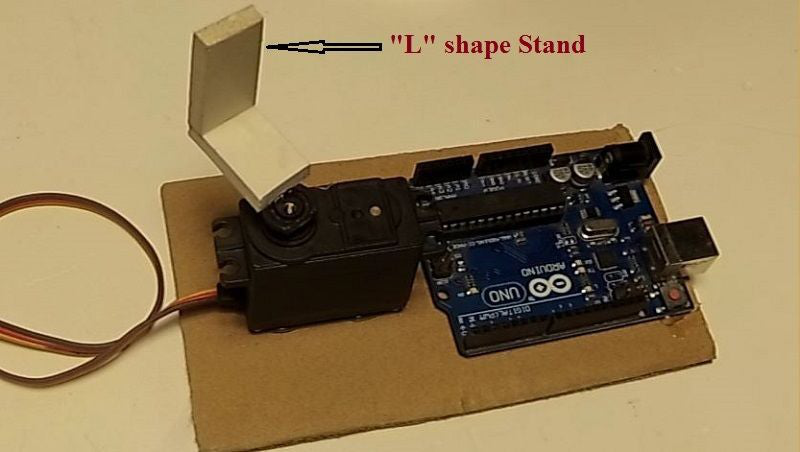
Sekarang, kita harus membuat braket berbentuk 'L' untuk sensor ultrasonik (HC-SR04) agar tetap berada di motor servo.
Langkah3:

Sekarang, kita harus menghubungkan sensor sonar ke Arduino. Berhati-hatilah saat menghubungkan VCC dan GND sensor masing-masing ke 5v dan GND Arduino. Setelah itu sambungkan pin trigonometri ke 8 dan pin echo ke 9 arduino.
Langkah 4:
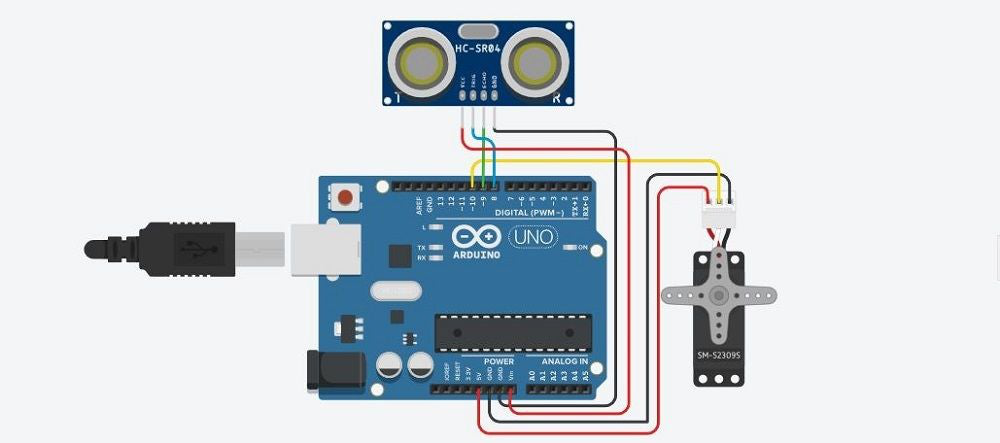
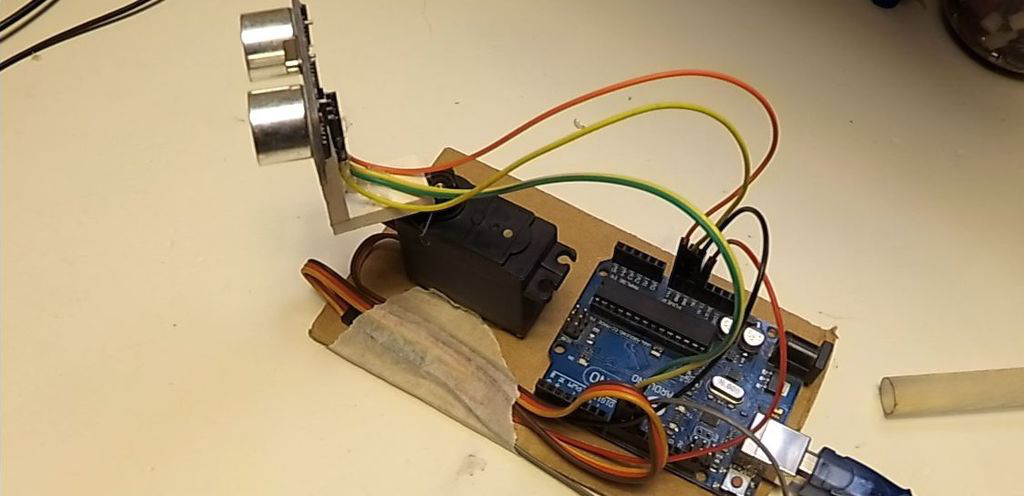
Setelah menghubungkan sensor transduser ultrasonik ke Arduino, sekarang saatnya menghubungkan motor servo ke sana. Sekali lagi, hati-hati saat menghubungkan VCC dan GND motor servo. Hubungkan sinyal servo ke pin 10 Arduino.
Langkah 5: Perangkat lunak yang diperlukan untuk radar Arduino:
Anda memerlukan Arduino IDE dan Processing IDE untuk menjalankan proyek radarnya.
Pemrosesan IDE akan mendapatkan nilai yang dikirim dari arduino dan menjelaskan area target (tanda merah). Ikuti tautan untuk mengunduhnya.
Pemrosesan IDE: https://processing.org/download/support.html
Arduino IDE: https://www.arduino.cc/en/main/software
Langkah 6: Kode Arduino:
#includeconst int TriggerPin = 8;
const int EchoPin = 9;
const int motorSignalPin = 10;
const int sudut awal = 90;
const int sudut minimum = 6;
const int Sudut maksimum = 175;
const int kecepatan rotasi = 1;
motor servo;
pengaturan batal (batal)
{pinMode(Pin Pemicu, KELUARAN);
pinMode (EchoPin, INPUT);
motor.attach (motorSignalPin);
Serial.mulai (9600);
lingkaran kosong (batal)
{statis int motorAngle = sudut awal;
static int motorRotateAmount = kecepatan rotasi;
motor.write (motorAngle);
Penundaan (10);
SerialOutput (motorAngle, Hitung Jarak ());
motorAngle + = motorRotateAmount;
(motorAngle '= minimumAngle || motorAngle' = maksimumAngle) {motorRotateAmount = -motorRotateAmount;
int Hitung Jarak (batal)
{digitalWrite(Pin Pemicu, TINGGI);
penundaanMikrodetik (10);
digitalWrite (TriggerPin, RENDAH);
durasi panjang = pulseIn (EchoPin, HIGH);
jarak mengambang = durasi * 0,017F;
return int (jarak);
void SerialOutput (sudut const int, jarak const int)
String angleString = String(sudut);
String jarakString = String(jarak);
Serial.println(angleString + ',' + distanceString);
Langkah 7: Tangani IDE:
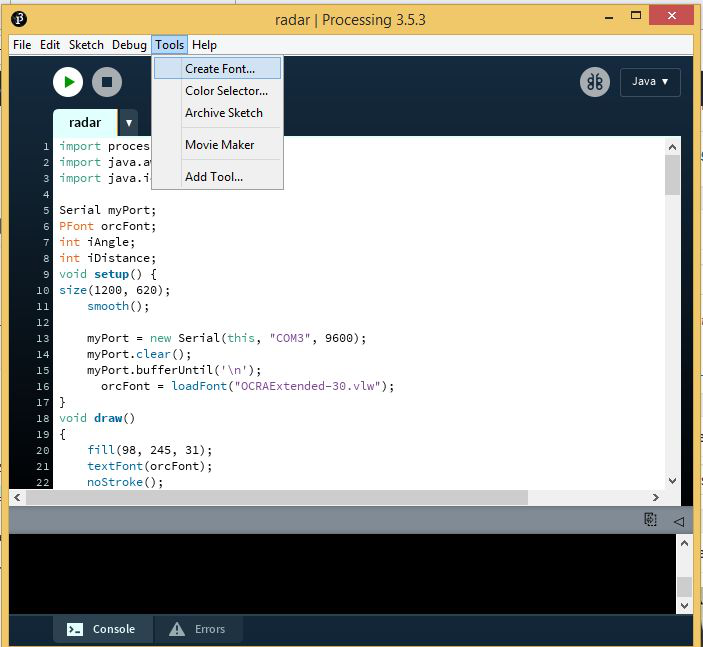
Kita dapat menggunakan IDE pemrosesan untuk dengan mudah menemukan objek apa pun dalam jangkauan (40 cm). Jika tidak ada IDE di PC Anda, silakan unduh. Sebelum menggunakan IDE ini, kita harus mengkonfigurasi fontnya.
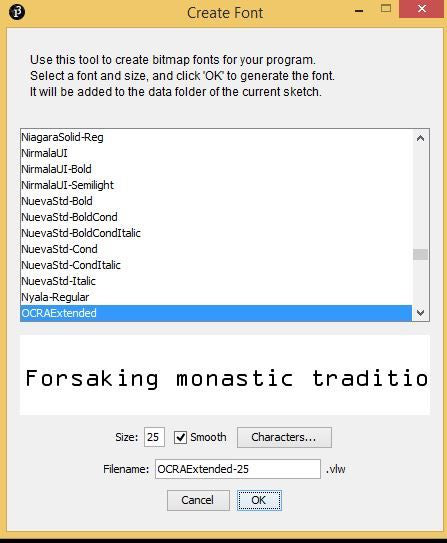
Untuk melakukan ini, kita harus menginstal file 'OCRAEXT.TTF' yang terletak di Radar.zip. Lalu, buka alat/buat Font. Pilih 'OCRAExended' dari daftar, pilih ukuran font 25 dan klik 'OK'.
Langkah8:
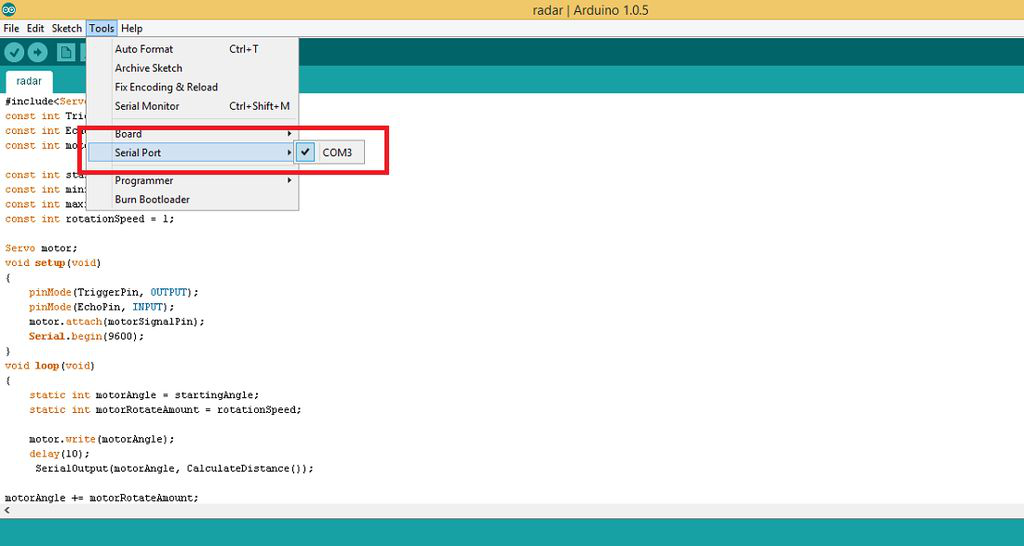
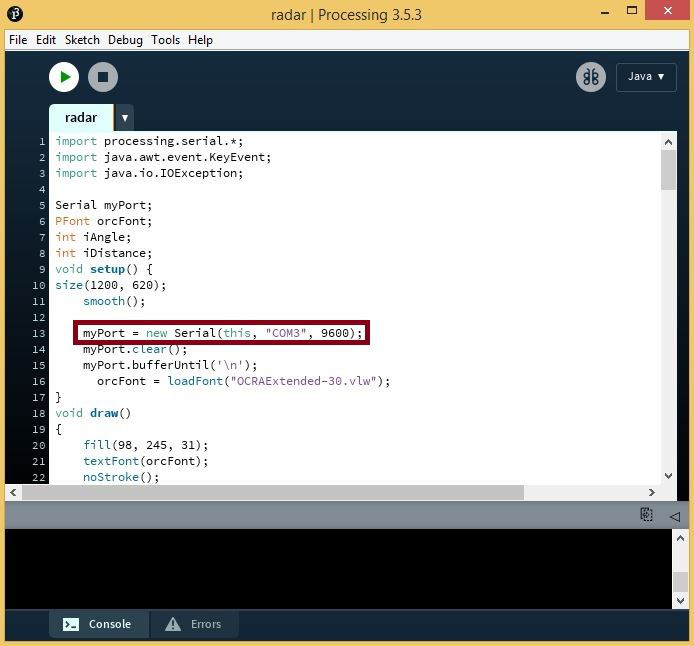
Sekarang, kita harus menemukan nomor port COM. Buka Arduino IDE dan temukan port Com (COM3 di foto). Tempatkan nomor port COM pada baris 13 kode pemrosesan (COM3 di foto).
Langkah9:
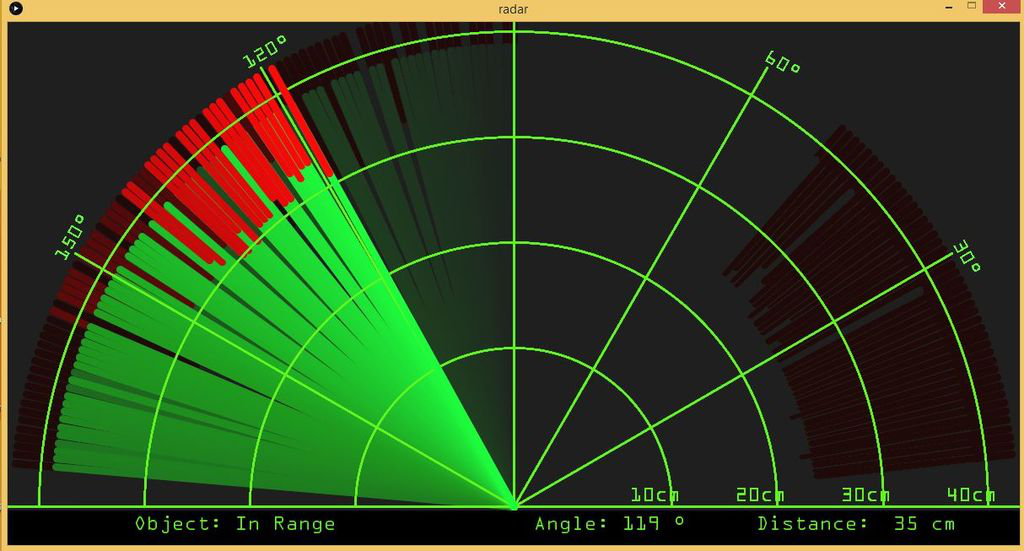
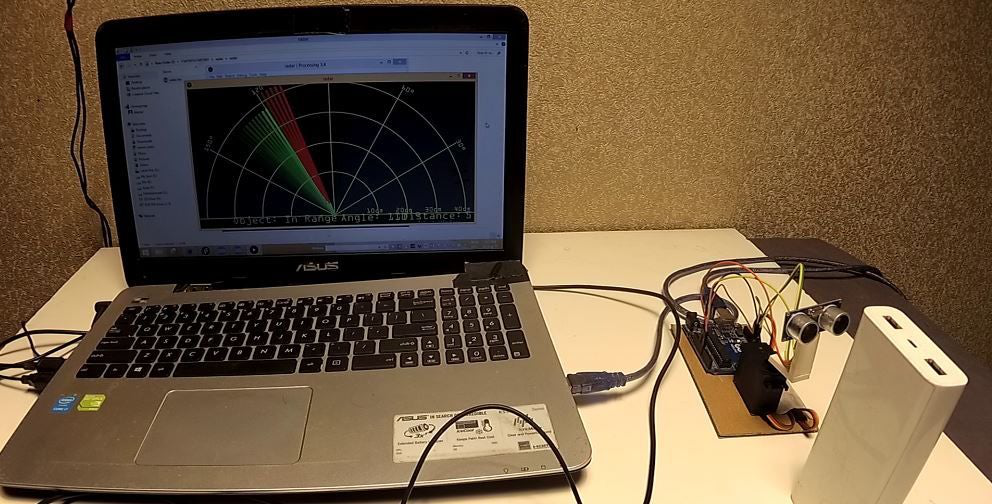
Terakhir, menekan tombol 'Jalankan' akan menampilkan jendela pemrosesan. Ini akan menunjukkan sudut servo radar dan jarak objek sensor transduser ultrasonik piezoelektrik.






 Tech Co,.Ltd")