Language



























Aantal keren bekeken: 17 Auteur: Site-editor Publicatietijd: 08-06-2020 Herkomst: Locatie








De component ultrasone sensoren die moeten worden vermeld wanneer wordt gebruikt om Arduino-radar te maken. ultrasoon
Arduino-bord (ik gebruik Arduino Uno)
Servomotor (mg-996)
HC-SR04 ultrasone sensor
BroodplankJumper
Stap1:
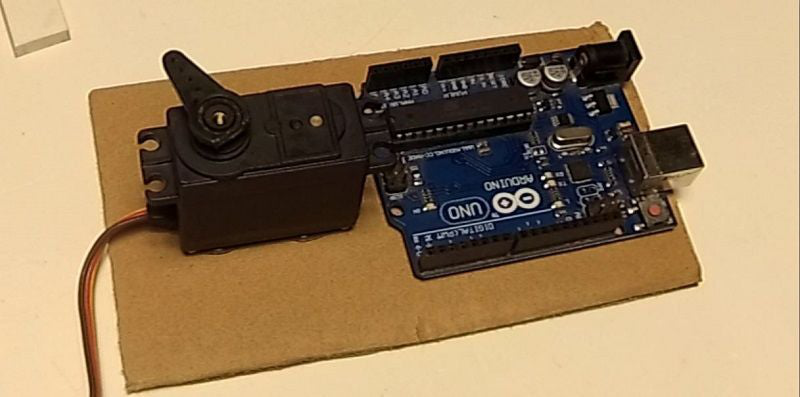
'Eerst moeten we een karton (15 cm * 8 cm) snijden. Vervolgens lijmen we de Arduino en de servomotor op de piëzo-elektrische ultrasone transducer
Stap2:
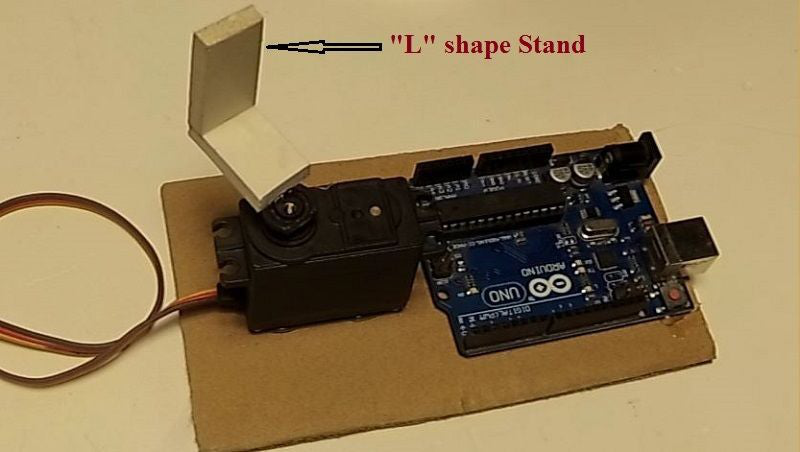
Nu moeten we een 'L'-vormige beugel maken voor de ultrasone sensor (HC-SR04) om deze op de servomotor te houden.
Stap3:

Nu moeten we de sonarsensor op de Arduino aansluiten. Wees voorzichtig wanneer u de VCC en GND van de sensor respectievelijk aansluit op 5V en GND van Arduino. Sluit daarna de trig-pin aan op 8 en de echo-pin op 9 van Arduino.
Stap 4:
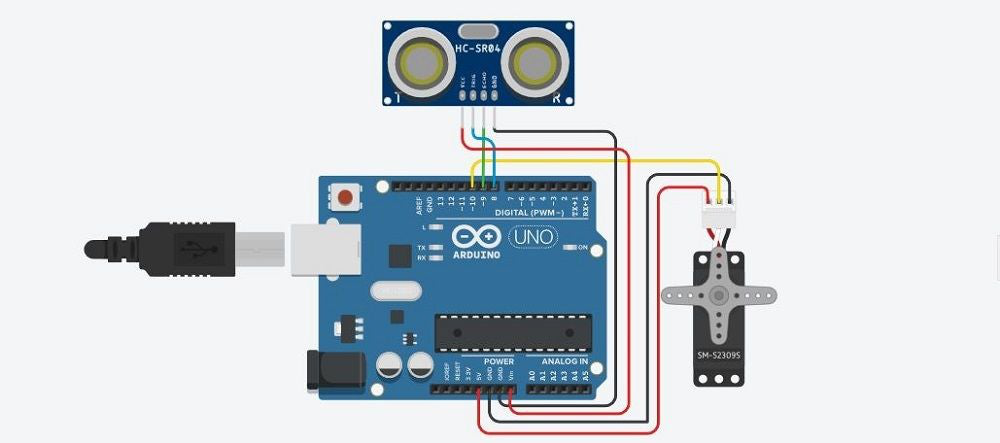
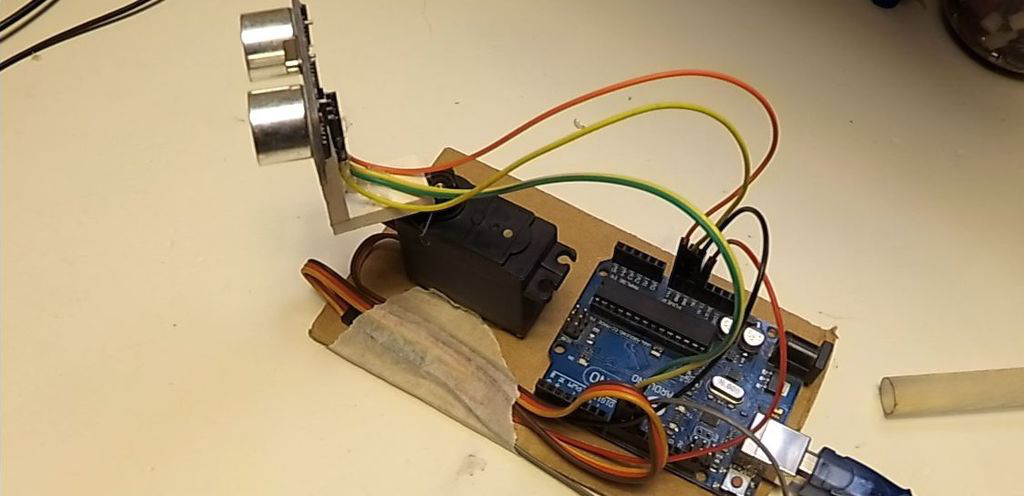
Nadat u de ultrasone transducersensor op de Arduino hebt aangesloten, is het tijd om de servomotor erop aan te sluiten. Zorg er opnieuw voor dat u de VCC en GND van de servomotor aansluit. Sluit het servosignaal aan op pin 10 van Arduino.
Stap 5: Software vereist voor Arduino-radar:
Je hebt Arduino IDE en Processing IDE nodig om het radarproject uit te voeren .
Bij het verwerken van IDE wordt de waarde verzonden door Arduino en wordt het doelgebied uitgelegd (rode markering). Volg de link om ze te downloaden.
Verwerking IDE: https://processing.org/download/support.html
Arduino IDE: https://www.arduino.cc/en/main/software
Stap 6: Arduino-code:
#includeconst int TriggerPin = 8;
const int EchoPin = 9;
const int motorSignalPin = 10;
const int starthoek = 90;
const int minimumAngle = 6;
const int maximumAngle = 175;
const int rotatiesnelheid = 1;
servomotor;
ongeldige instelling (ongeldig)
{pinModus(TriggerPin, UITVOER);
pinMode (EchoPin, INPUT);
motor.attach (motorSignalPin);
Serieel.begin (9600);
lege lus (leegte)
{statisch int motorAngle = starthoek;
statische int motorRotateAmount = rotatiesnelheid;
motor.write (motorAngle);
Vertraging (10);
SerialOutput (motorAngle, CalculateDistance());
motorAngle + = motorRotateAmount;
(motorAngle '= minimumAngle || motorAngle' = maximumAngle) {motorRotateAmount = -motorRotateAmount;
int BerekenAfstand (nietig)
{digitalWrite(TriggerPin, HOOG);
vertragingMicroseconden (10);
digitalWrite (TriggerPin, LAAG);
lange duur = pulseIn (EchoPin, HOOG);
zweefafstand = duur * 0,017F;
retour int (afstand);
void SerialOutput (const int hoek, const int afstand)
String hoekString = String(hoek);
String afstandString = String(afstand);
Serial.println(angleString + ',' + afstandString);
Stap 7: Behandel de IDE:
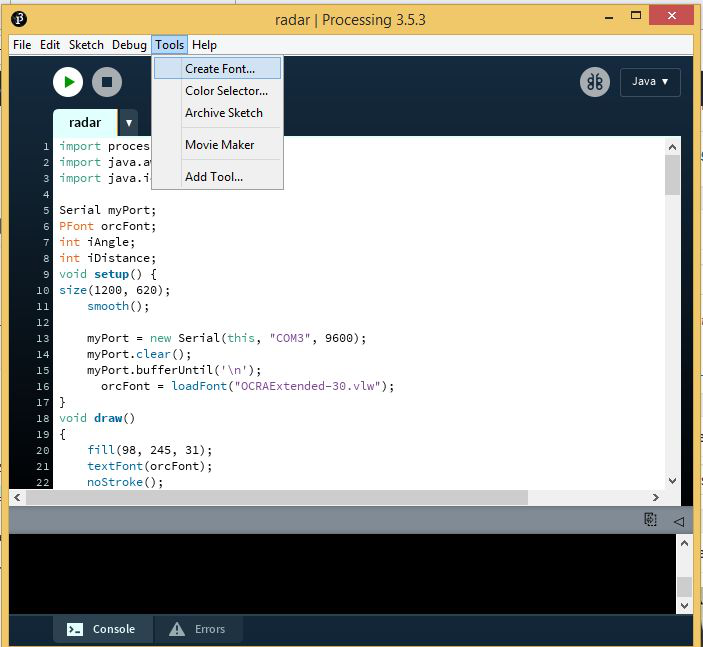
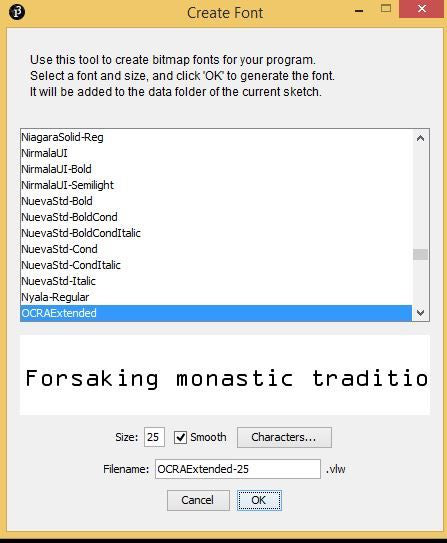
We kunnen de verwerkings-IDE gebruiken om eenvoudig elk object binnen het bereik (40 cm) te vinden. Als er geen IDE op uw pc staat, download deze dan. Voordat we deze IDE gebruiken, moeten we het lettertype configureren.
Om dit te doen, moeten we het bestand 'OCRAEXT.TTF' in Radar.zip installeren. Ga vervolgens naar Extra/Lettertype maken. Selecteer 'OCRAExtended' uit de lijst, selecteer een lettergrootte van 25 en klik op 'OK'.
Stap 8:
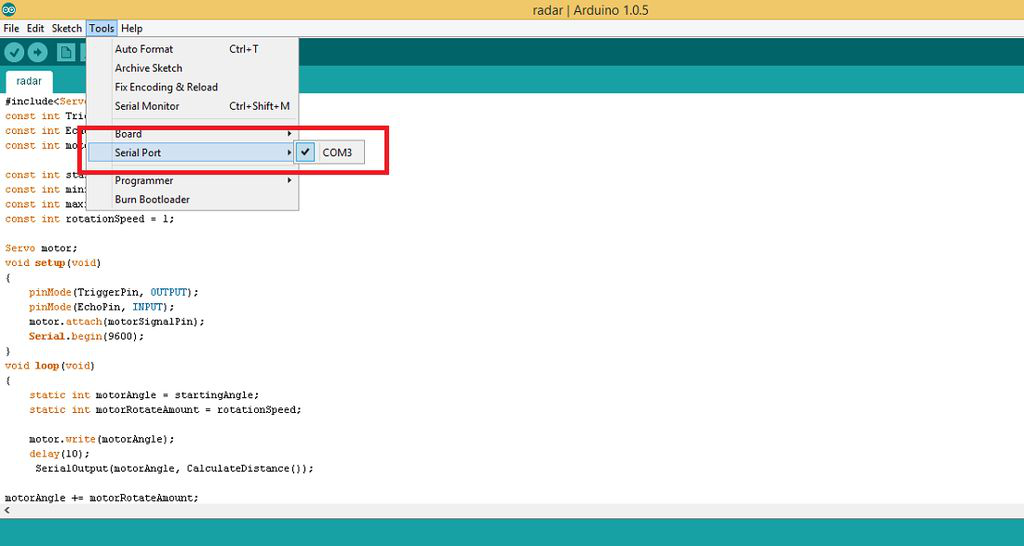
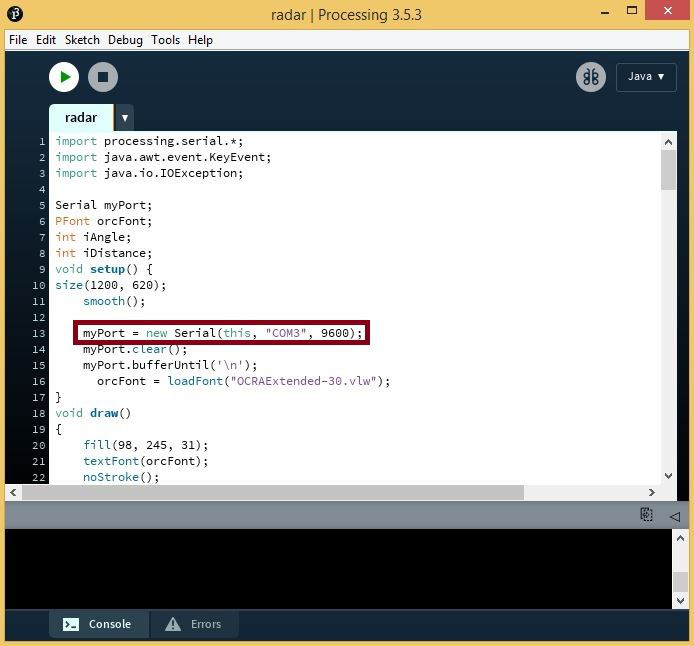
Nu moeten we het COM-poortnummer vinden. Ga naar de Arduino IDE en zoek de Com-poort (COM3 op de foto). Plaats het COM-poortnummer op regel 13 van de verwerkingscode (COM3 op de foto).
Stap9:
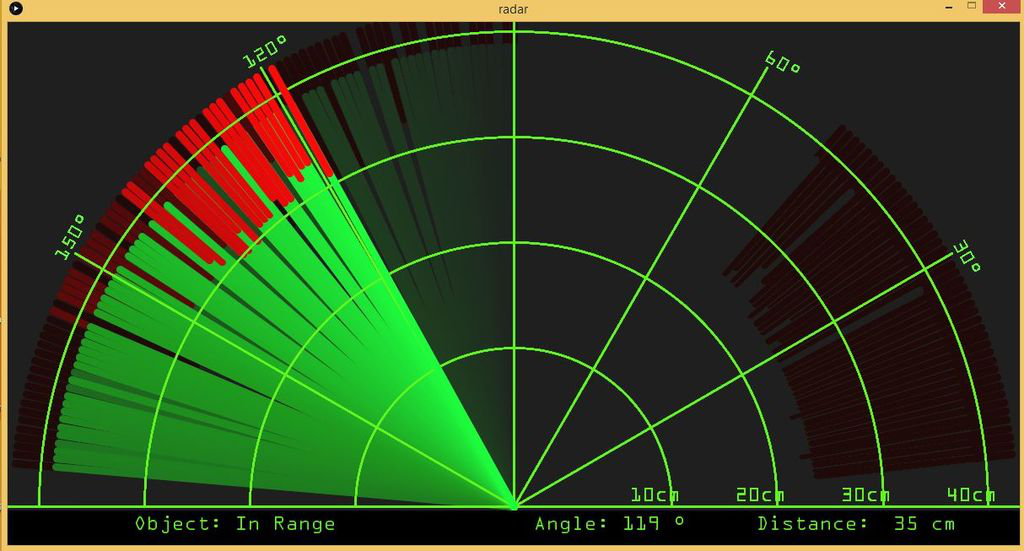
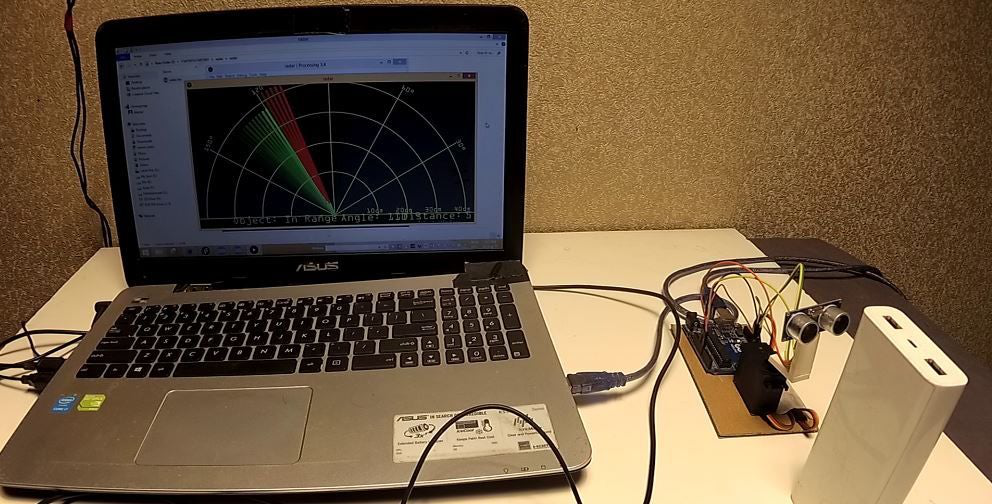
Als u ten slotte op de knop 'Uitvoeren' drukt, wordt een verwerkingsvenster weergegeven. Het toont de radarservohoek en objectafstand e van de piëzo-elektrische ultrasone transducersensor.






 Tech Co,.Ltd")