Language



























Zobrazení: 17 Autor: Editor webu Čas publikování: 2020-06-08 Původ: místo








Komponentní ultrazvukové senzory, které je třeba uvést, když používá ultrazvuk k výrobě radaru arduino.
Arduino deska (používám arduino Uno)
Servomotor (mg-996)
Ultrazvukový senzor HC-SR04
Breadboard Jumper
Krok 1:
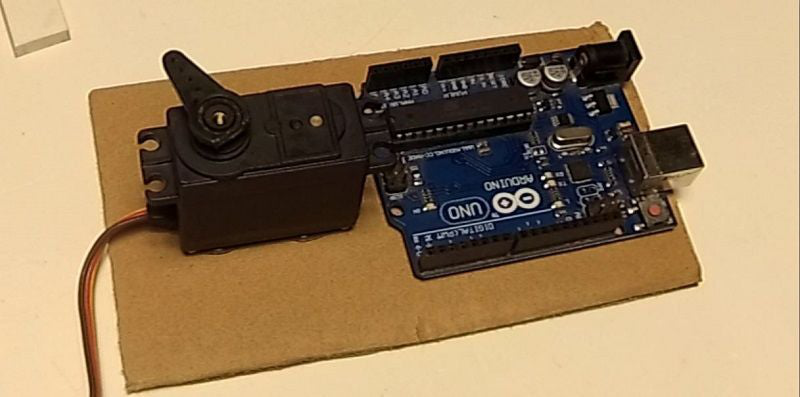
'Nejprve musíme uříznout karton (15 cm * 8 cm). Poté přilepte arduino a servomotor na piezoelektrický ultrazvukový měnič
Krok 2:
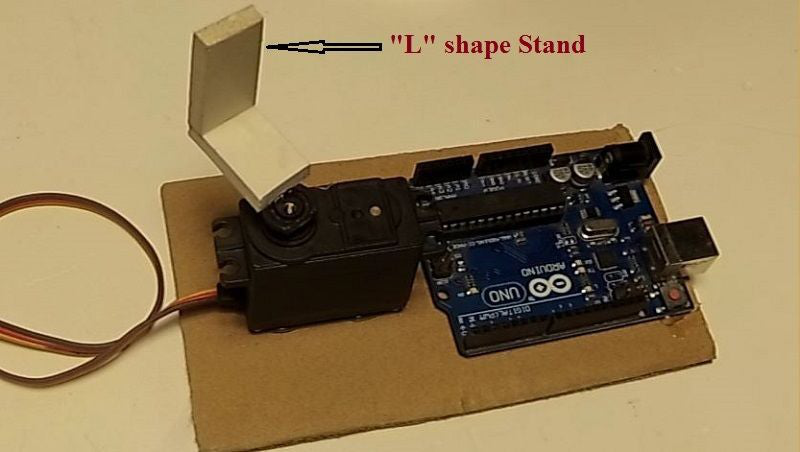
Nyní musíme vyrobit držák ve tvaru 'L' pro ultrazvukový senzor (HC-SR04), který jej udrží na servomotoru.
Krok 3:

Nyní musíme připojit sonarový senzor k arduinu. Buďte opatrní, když připojujete VCC a GND snímače k 5V a GND arduina. Poté připojte spouštěcí kolík k 8 a kolík echa k 9 arduina.
Krok 4:
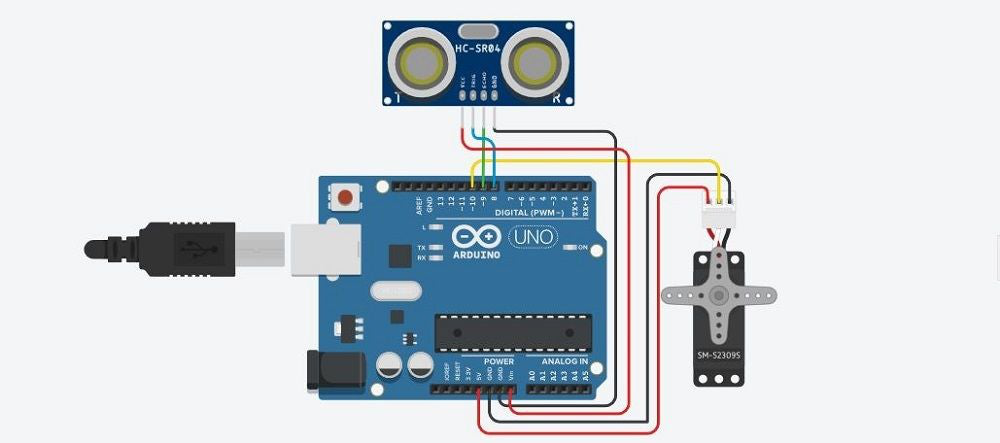
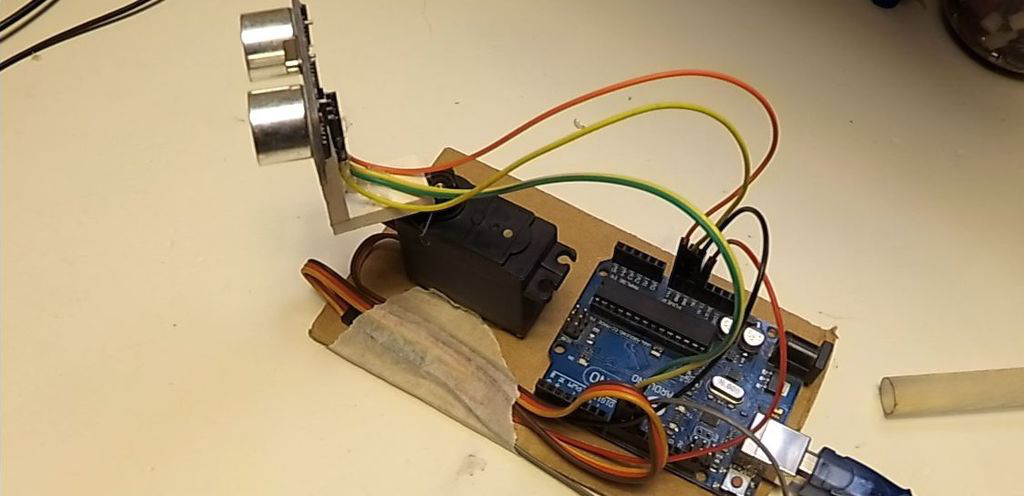
Po připojení snímače ultrazvukového převodníku k arduinu je čas k němu připojit servomotor. Opět dávejte pozor na připojení VCC a GND servomotoru. Připojte signál serva ke kolíku 10 arduina.
Krok 5: Software požadovaný pro radar Arduino:
Ke spuštění radarového projektu budete potřebovat arduino IDE a Processing IDE.
Zpracování IDE získá hodnotu odeslanou z arduina a vysvětlí cílovou oblast (červená značka). Chcete-li si je stáhnout, klikněte na odkaz.
Zpracování IDE: https://processing.org/download/support.html
Arduino IDE: https://www.arduino.cc/en/main/software
Krok 6: Kód Arduina:
#includeconst int TriggerPin = 8;
const int EchoPin = 9;
const int motorSignalPin = 10;
const int počáteční úhel = 90;
const int minimumAngle = 6;
const int maximumAngle = 175;
const int rychlost rotace = 1;
servomotor;
void setup (void)
{pinMode(TriggerPin, OUTPUT);
pinMode (EchoPin, INPUT);
motor.attach (motorSignalPin);
Serial.begin (9600);
prázdná smyčka (prázdná)
{static int motorAngle = startovni uhel;
static int motorRotateAmount = rychlost rotace;
motor.write (motorAngle);
Zpoždění (10);
SerialOutput (motorAngle, CalculateDistance());
motorAngle + = motorRotateAmount;
(úhel motoru '= minimální Úhel || Úhel motoru' = maximálníÚhel) {motorRotateAmount = -motorRotateAmount;
int CalculateDistance (neplatné)
{digitalWrite(TriggerPin, HIGH);
zpožděníMikrosekundy (10);
digitalWrite (TriggerPin, LOW);
dlouhé trvání = pulseIn (EchoPin, HIGH);
vzdálenost plováku = trvání * 0,017F;
return int (vzdálenost);
void SerialOutput (const int angle, const int distance)
String angleString = String(uhel);
String distanceString = String(vzdálenost);
Serial.println(angleString + ',' + distanceString);
Krok 7: Zpracování IDE:
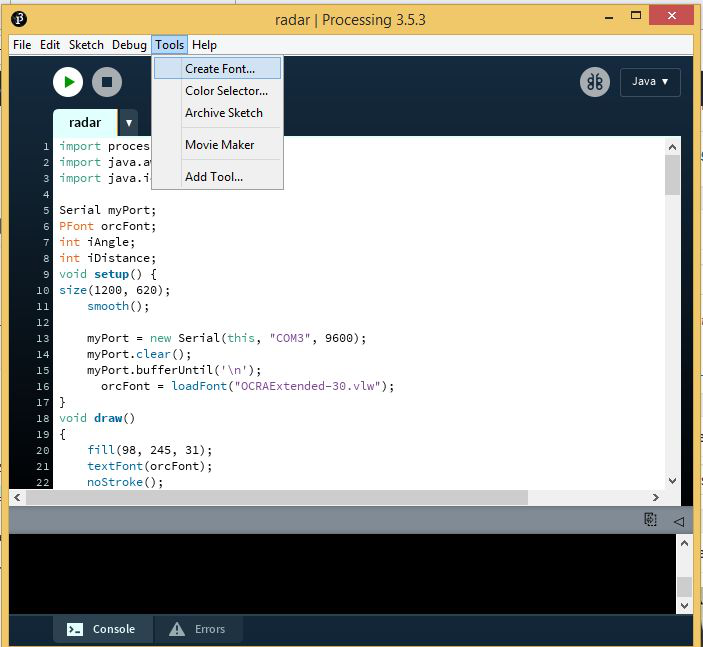
Pomocí zpracovatelského IDE můžeme snadno najít jakýkoli objekt v dosahu (40 cm). Pokud na vašem PC není IDE, stáhněte si ho. Před použitím tohoto IDE musíme nakonfigurovat písmo.
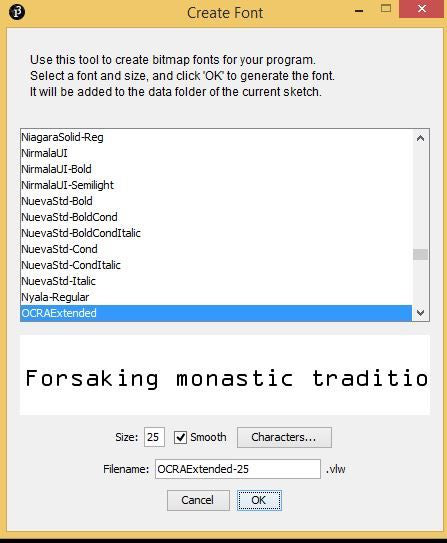
K tomu musíme nainstalovat soubor 'OCRAEXT.TTF' umístěný v Radar.zip. Poté přejděte na nástroje/vytvořit písmo. Ze seznamu vyberte 'OCRAExtended', zvolte velikost písma 25 a klikněte na 'OK'.
Krok 8:
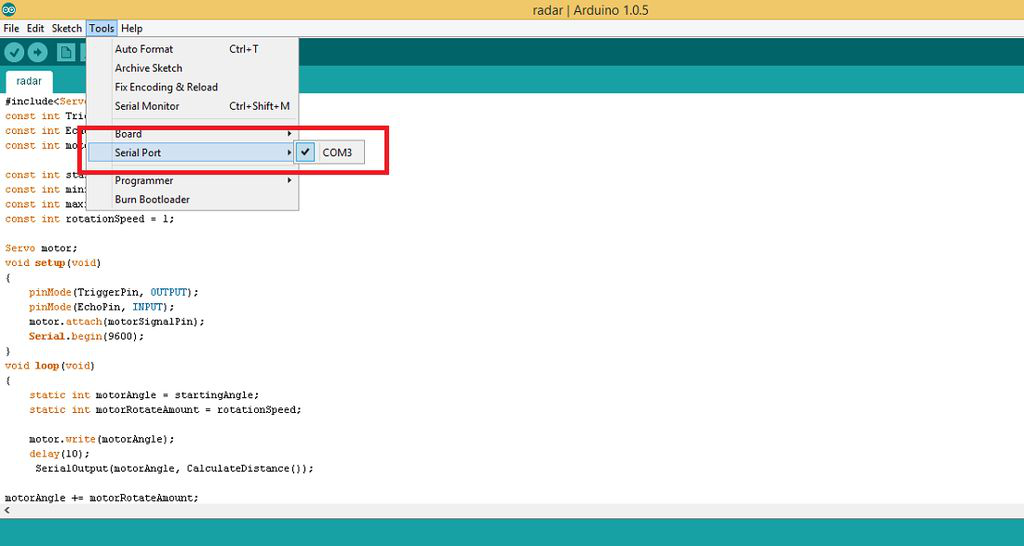
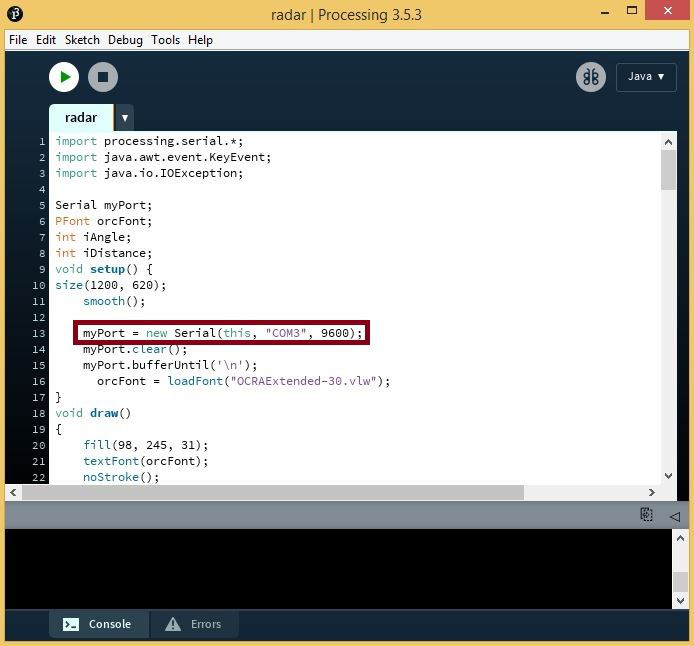
Nyní musíme najít číslo COM portu. Přejděte do Arduino IDE a najděte Com port (COM3 na fotografii). Umístěte číslo portu COM na řádek 13 kódu zpracování (COM3 na fotografii).
Krok 9:
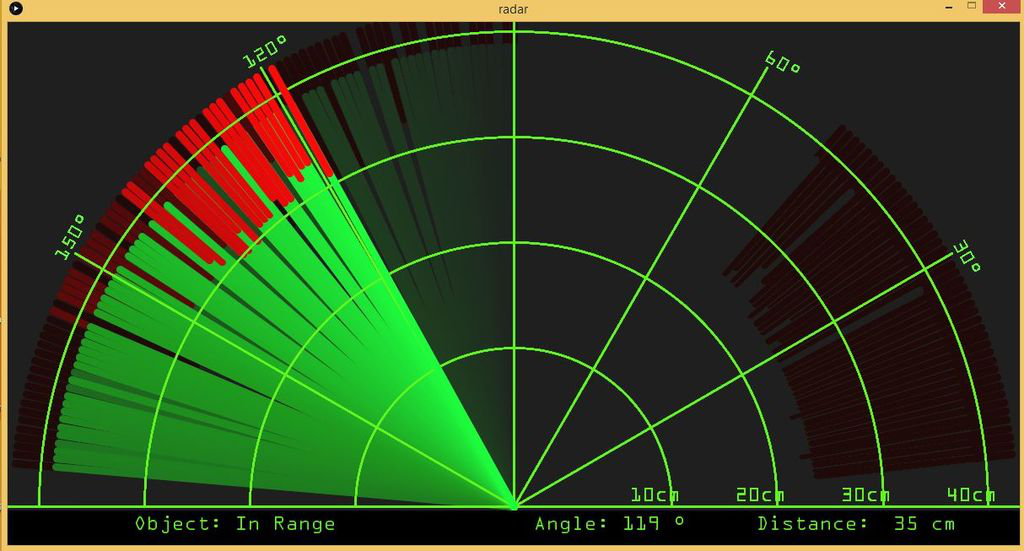
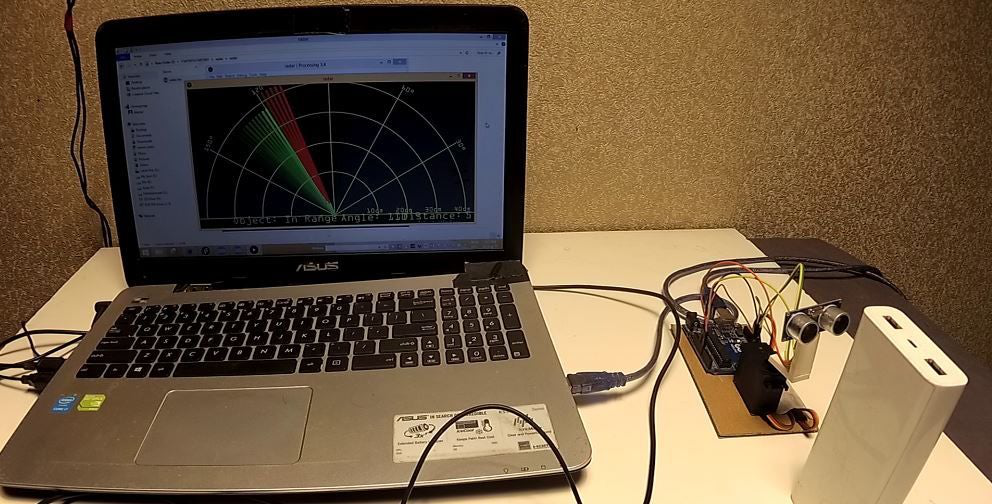
Nakonec stisknutím tlačítka 'Spustit' zobrazíte okno zpracování. Ukáže radarový úhel serva a vzdálenost objektu piezoelektrického ultrazvukového snímače.






 Tech Co,.Ltd")