Language



























Visningar: 17 Författare: Webbplatsredaktör Publiceringstid: 2020-06-08 Ursprung: Plats








Komponenterna för ultraljudssensorer som måste listas när de använder ultraljud för att göra arduino-radar.
Arduino Board (jag använder arduino Uno)
Servomotor (mg-996)
HC-SR04 ultraljudssensor
BreadboardJumper
Steg 1:
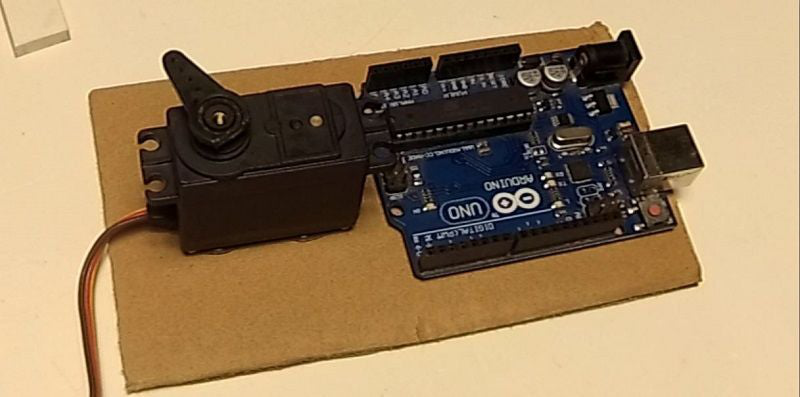
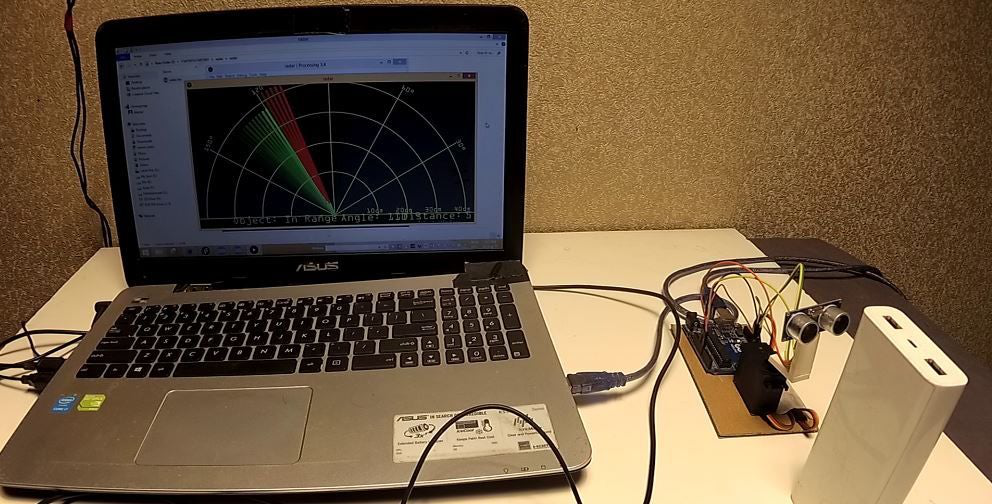
'Först måste vi skära en kartong (15 cm * 8 cm). Sedan limmar du arduino- och servomotorn på en piezoelektrisk ultraljudsgivare
Steg 2:
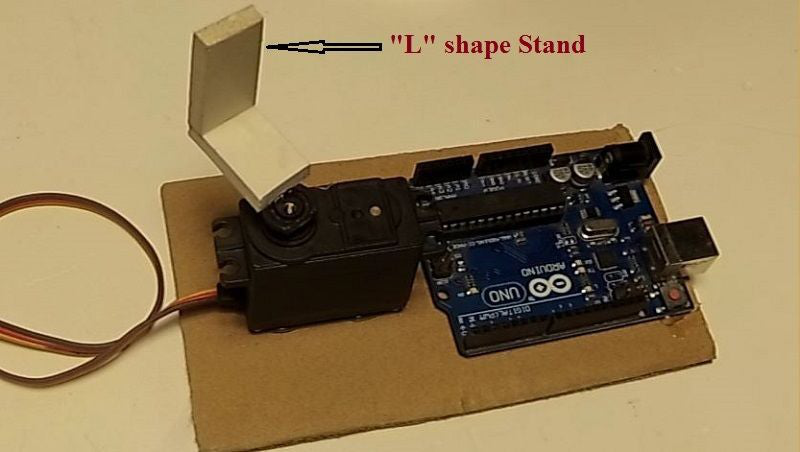
Nu måste vi göra en 'L'-formad konsol för ultraljudssensorn (HC-SR04) för att hålla den på servomotorn.
Steg 3:

Nu måste vi ansluta ekolodssensorn till arduino. Var försiktig när du ansluter sensorns VCC och GND till 5v respektive GND på arduino. Efter det, anslut triggstiftet till 8 och ekostiftet till 9 på arduino.
Steg 4:
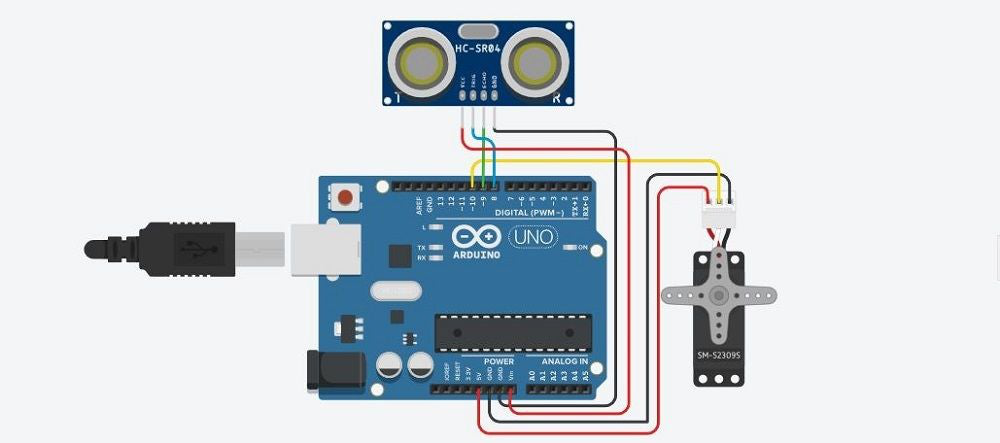
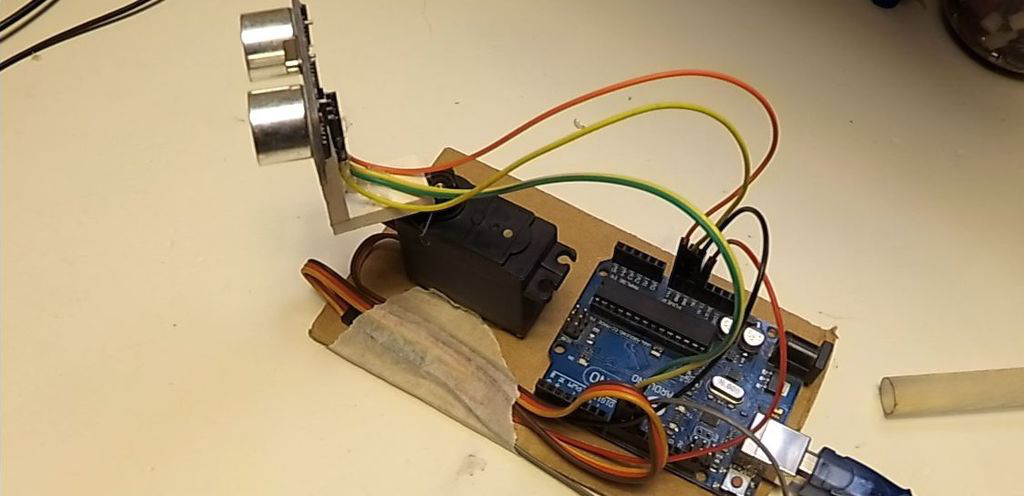
Efter att ha anslutit ultraljudsgivaren till arduinon är det dags att ansluta servomotorn till den. Återigen, var noga med att ansluta VCC och GND på servomotorn. Anslut servosignalen till stift 10 på arduino.
Steg 5: Programvara som krävs för Arduino radar:
Du behöver arduino IDE och Processing IDE för att köra det radarprojekt .
Bearbetning av IDE kommer att få värdet skickat från arduino och förklara målområdet (röd markering). Följ länken för att ladda ner dem.
Bearbetar IDE: https://processing.org/download/support.html
Arduino IDE: https://www.arduino.cc/en/main/software
Steg 6: Arduino-kod:
#includeconst int TriggerPin = 8;
const int EchoPin = 9;
const int motorSignalPin = 10;
const int startAngle = 90;
const int minimumAngle = 6;
const int maximumAngle = 175;
const int rotationSpeed = 1;
servomotor;
ogiltig inställning (ogiltig)
{pinMode(TriggerPin, OUTPUT);
pinMode (EchoPin, INPUT);
motor.attach (motorSignalPin);
Serial.begin (9600);
void loop (void)
{static int motorAngle = startAngle;
static int motorRotateAmount = rotationSpeed;
motor.write (motorAngle);
Fördröjning (10);
SerialOutput (motorAngle, CalculateDistance());
motorAngle + = motorRotateAmount;
(motorAngle '= minimumAngle || motorAngle' = maximumAngle) {motorRotateAmount = -motorRotateAmount;
int CalculateDistance (void)
{digitalWrite(TriggerPin, HIGH);
delayMikrosekunder (10);
digitalWrite (TriggerPin, LOW);
lång varaktighet = pulseIn (EchoPin, HIGH);
flytavstånd = varaktighet * 0,017F;
retur int (avstånd);
void SerialOutput (konst int vinkel, konstant int avstånd)
String angleString = String(vinkel);
String distanceString = String(distance);
Serial.println(angleString + ',' + distanceString);
Steg 7: Hantera IDE:
Vi kan använda bearbetnings-IDE för att enkelt hitta vilket objekt som helst inom intervallet (40 cm). Om det inte finns någon IDE på din PC, ladda ner den. Innan vi använder denna IDE måste vi konfigurera teckensnittet.
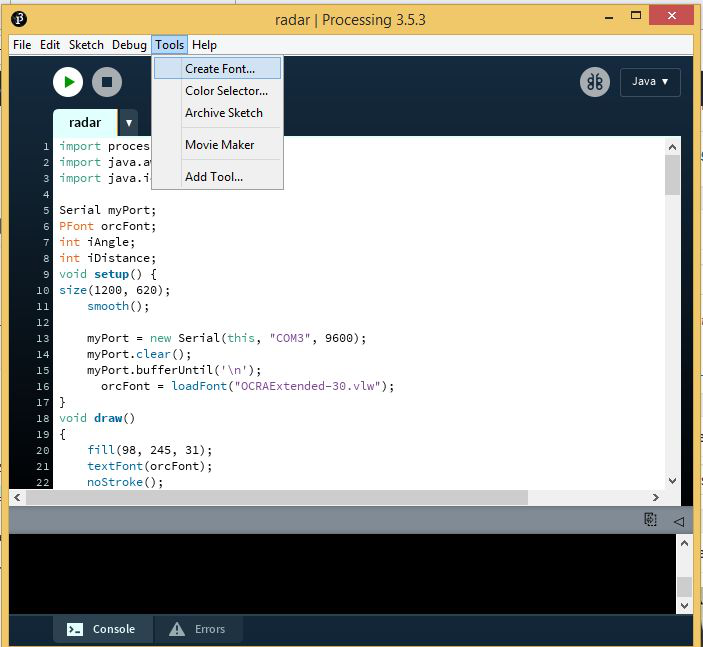
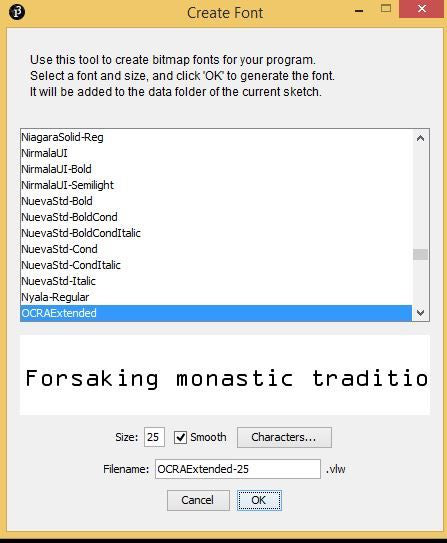
För att göra detta måste vi installera filen 'OCRAEXT.TTF' som finns i Radar.zip. Gå sedan till verktyg/skapa teckensnitt. Välj 'OCRAExtended' från listan, välj en teckenstorlek på 25 och klicka på 'OK'.
Steg 8:
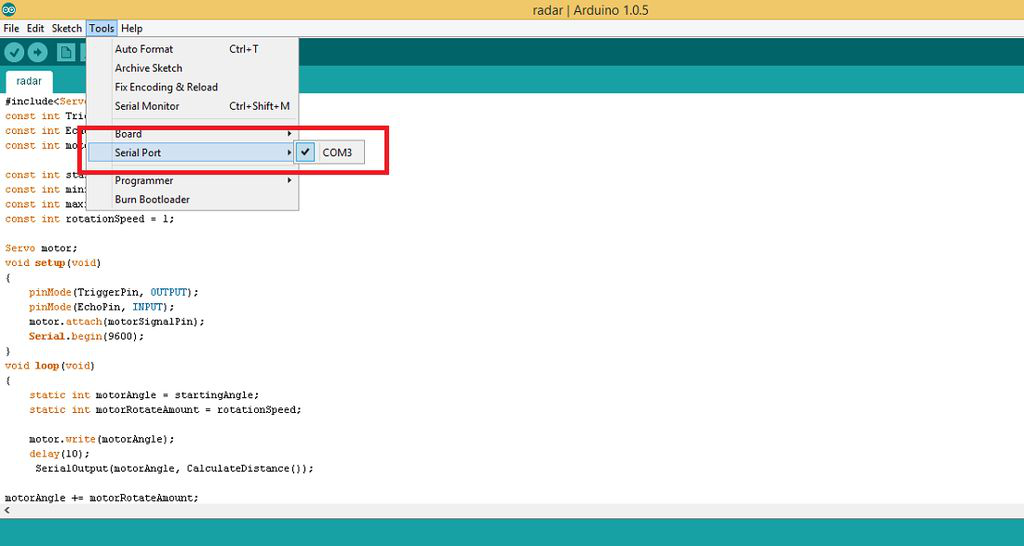
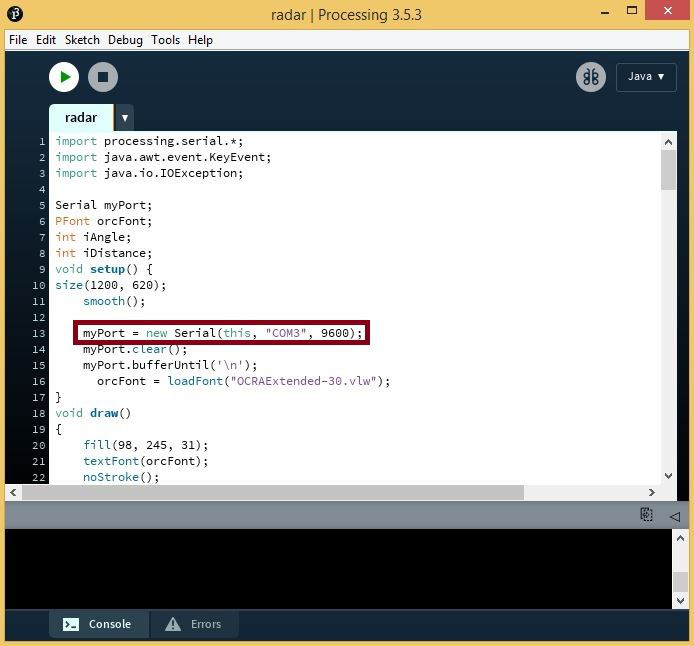
Nu måste vi hitta COM-portnumret. Gå till Arduino IDE och hitta Com-porten (COM3 på bilden). Placera COM-portnumret på rad 13 i bearbetningskoden (COM3 på bilden).
Steg 9:
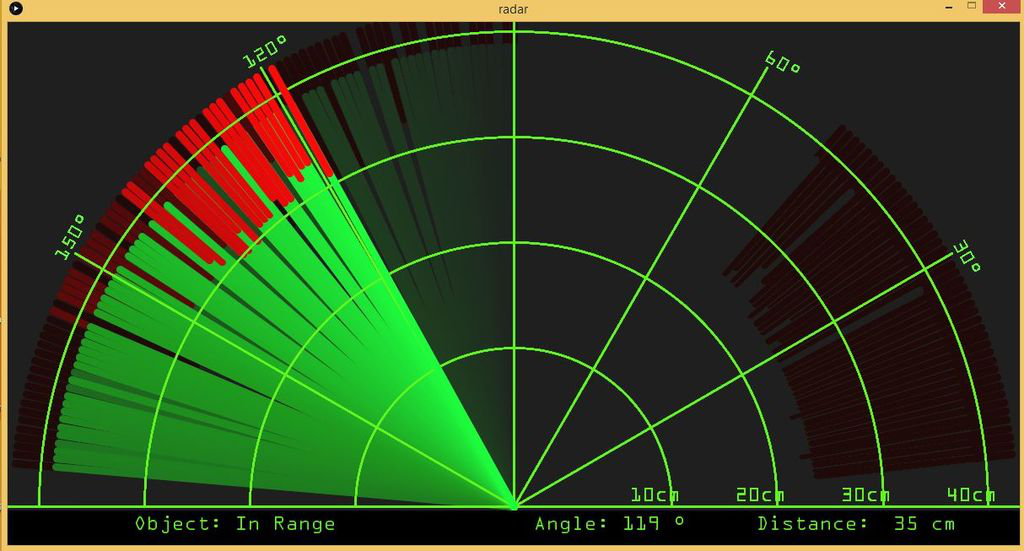
Om du slutligen trycker på 'Kör'-knappen visas ett bearbetningsfönster. Den kommer att visa radarservovinkeln och objektavståndet för den piezoelektriska ultraljudsgivaren.






 Tech Co,.Ltd")