Language



























Перегляди: 17 Автор: Редактор сайту Час публікації: 2020-06-08 Походження: Сайт








Компоненти ультразвукових датчиків, які необхідно вказати, коли ультразвук використовується для створення радара arduino.
Плата Arduino (я використовую arduino Uno)
Серводвигун (mg-996)
Ультразвуковий датчик HC-SR04
BreadboardJumper
крок 1:
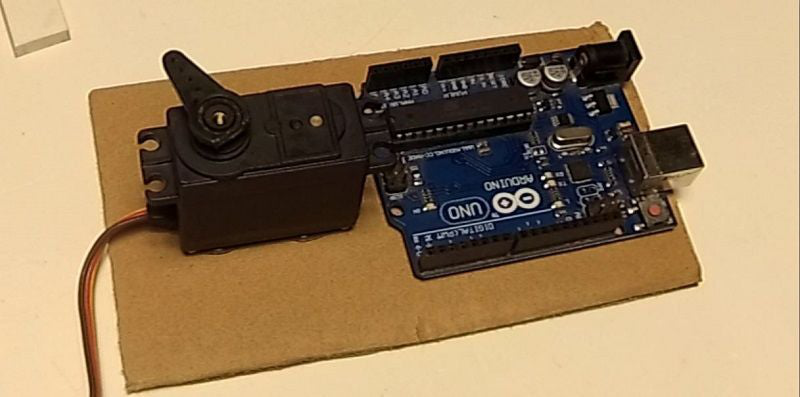
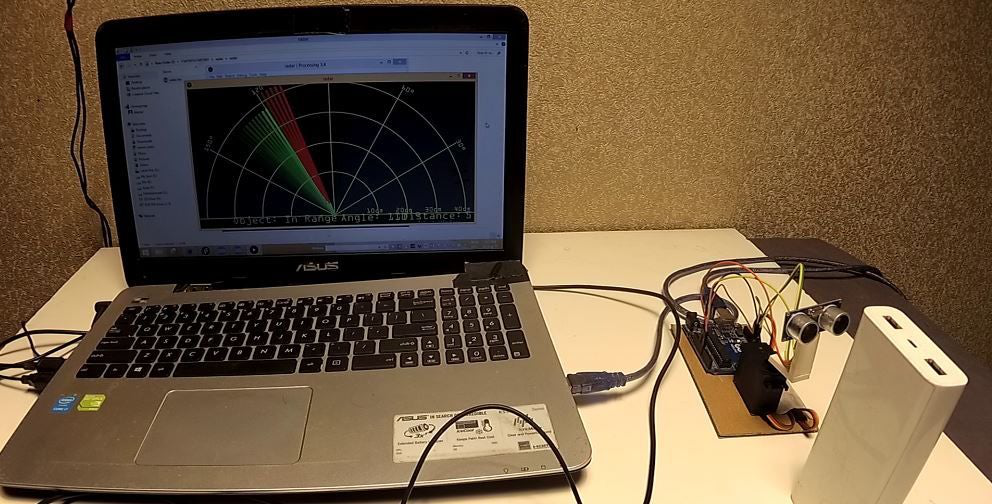
'Спочатку ми повинні вирізати картонну дошку (15 см * 8 см). Потім приклеїти arduino і серводвигун на п'єзоелектричний ультразвуковий перетворювач
Крок 2:
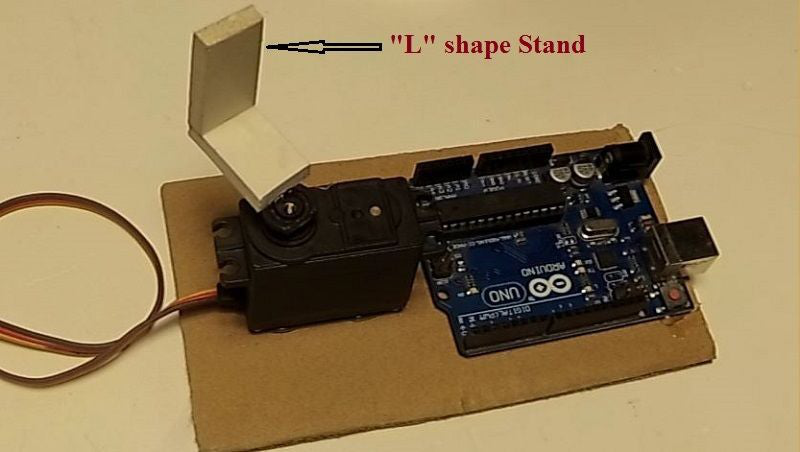
Тепер ми повинні зробити L-подібний кронштейн для ультразвукового датчика (HC-SR04), щоб тримати його на серводвигуні.
крок 3:

Тепер ми повинні підключити датчик сонара до Arduino. Будьте обережні, коли підключаєте VCC і GND датчика до 5v і GND arduino відповідно. Після цього підключіть тригонометричний контакт до 8, а ехо-пін до 9 arduino.
крок 4:
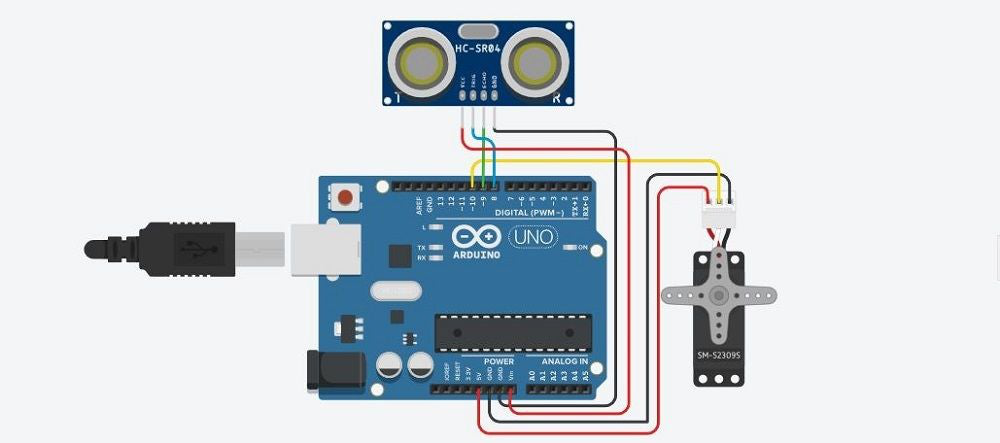
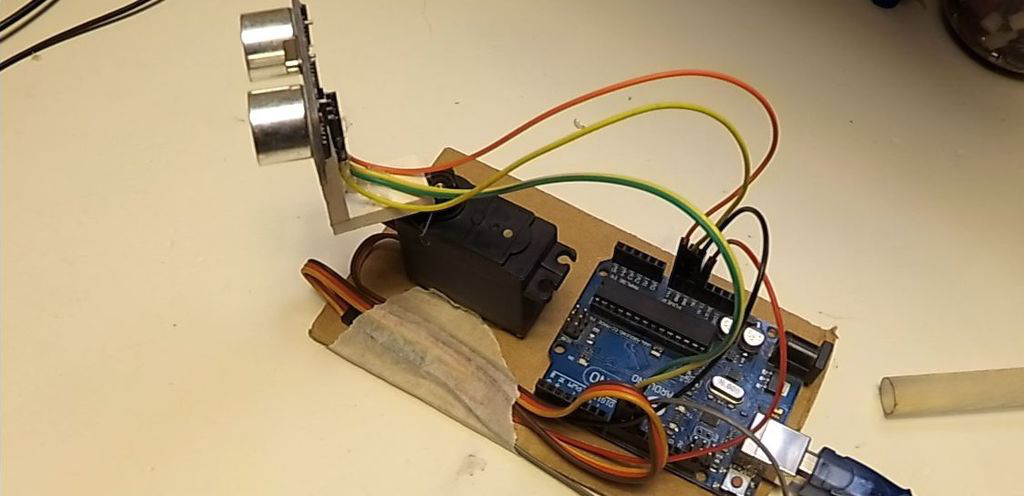
Після підключення датчика ультразвукового перетворювача до arduino настав час підключити до нього серводвигун. Знову ж таки, будьте обережні, щоб підключити VCC і GND серводвигуна. Підключіть сигнал сервосистеми до контакту 10 Arduino.
Крок 5. Програмне забезпечення, необхідне для радара Arduino:
Щоб запустити радарний проект, вам знадобляться arduino IDE та Processing IDE .
Обробка IDE отримає значення, надіслане з arduino, і пояснить цільову область (червона позначка). Перейдіть за посиланням, щоб завантажити їх.
Обробка IDE: https://processing.org/download/support.html
Arduino IDE: https://www.arduino.cc/en/main/software
Крок 6: Код Arduino:
#includeconst int TriggerPin = 8;
const int EchoPin = 9;
const int motorSignalPin = 10;
const int початковий кут = 90;
const int minimumAngle = 6;
const int maximumAngle = 175;
const int rotationSpeed = 1;
сервомотор;
недійсне налаштування (недійсне)
{pinMode(TriggerPin, OUTPUT);
pinMode (EchoPin, INPUT);
motor.attach (motorSignalPin);
Serial.begin (9600);
void loop (пустота)
{static int motorAngle = початковий кут;
static int motorRotateAmount = rotationSpeed;
motor.write (motorAngle);
Затримка (10);
SerialOutput (motorAngle, CalculateDistance());
motorAngle + = motorRotateAmount;
(motorAngle '= мінімальний кут || motorAngle' = максимальний кут) {motorRotateAmount = -motorRotateAmount;
int CalculateDistance (недійсно)
{digitalWrite(TriggerPin, HIGH);
delayMicroseconds (10);
digitalWrite (TriggerPin, LOW);
велика тривалість = pulseIn (EchoPin, HIGH);
float distance = тривалість * 0,017F;
return int (відстань);
void SerialOutput (const int angle, const int distance)
String angleString = String(angle);
String distanceString = String(distance);
Serial.println(angleString + ',' + distanceString);
Крок 7: Керуйте IDE:
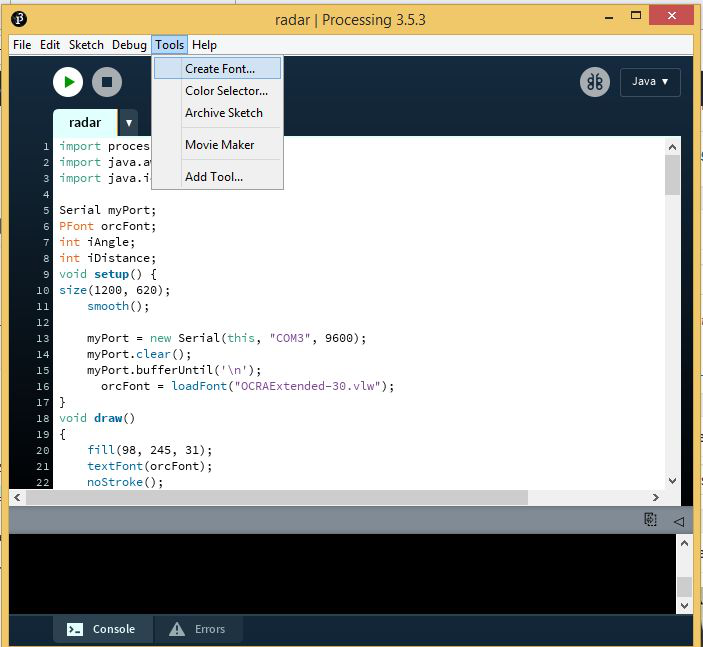
Ми можемо використовувати IDE для обробки, щоб легко знайти будь-який об’єкт у радіусі (40 см). Якщо на вашому ПК немає IDE, завантажте його. Перш ніж використовувати цю IDE, ми повинні налаштувати шрифт.
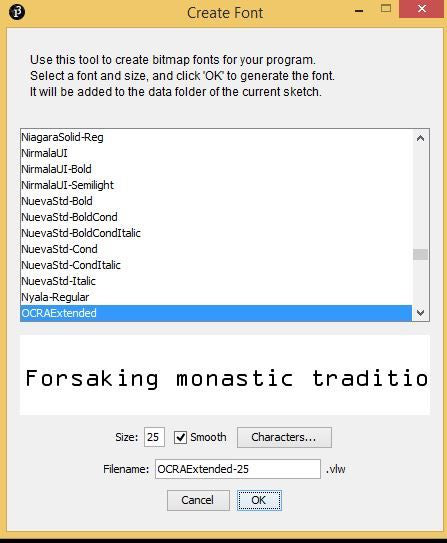
Для цього ми повинні встановити файл 'OCRAEXT.TTF', який знаходиться в Radar.zip. Потім перейдіть до інструментів/створити шрифт. Виберіть 'OCRAExtended' зі списку, виберіть розмір шрифту 25 і натисніть 'OK'.
Крок 8:
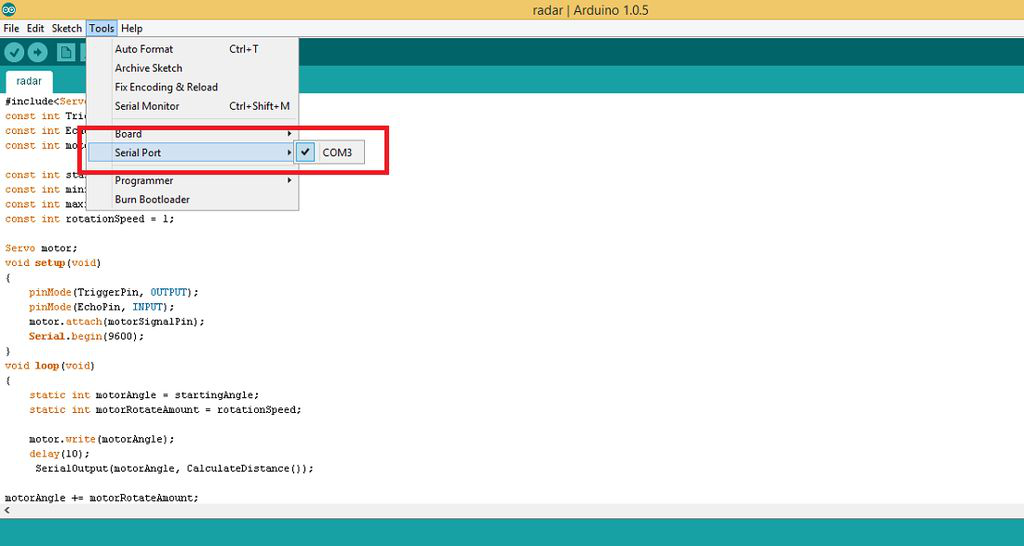
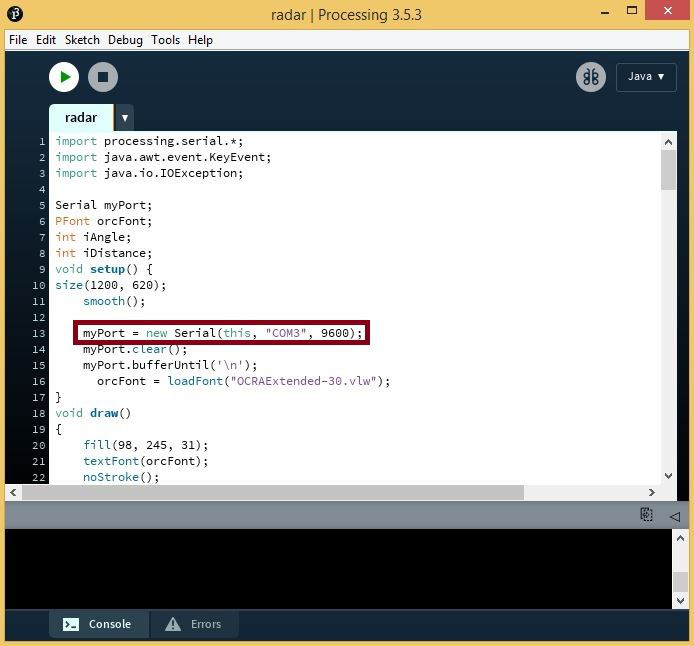
Тепер ми повинні знайти номер COM-порту. Перейдіть до Arduino IDE і знайдіть порт Com (COM3 на фото). Помістіть номер COM-порту в рядок 13 коду обробки (COM3 на фото).
Крок 9:
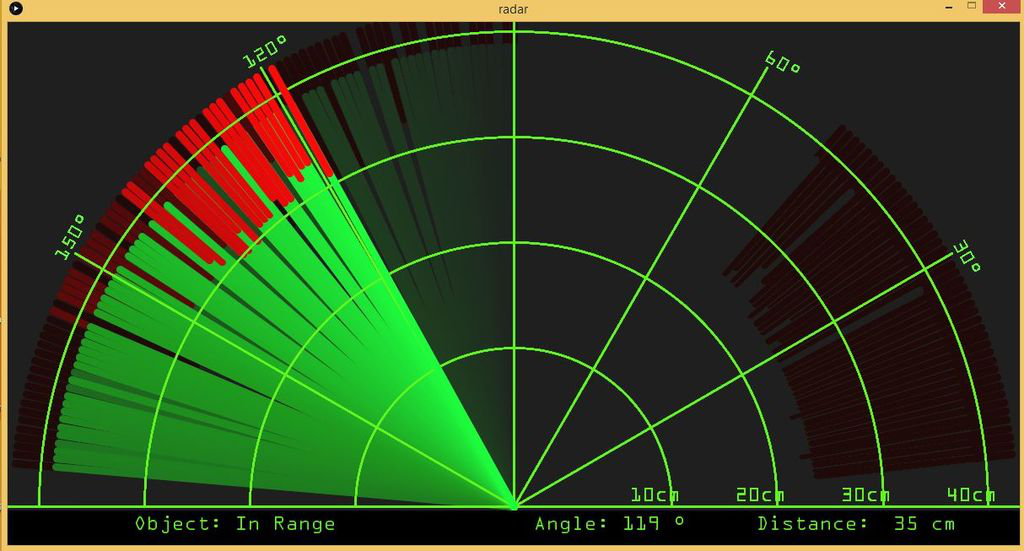
Нарешті, натиснувши кнопку 'Виконати', відобразиться вікно обробки. Він покаже радарний сервокут і відстань до об’єкта датчика п’єзоелектричного ультразвукового перетворювача.






 Tech Co,.Ltd")