Language



























بازدیدها: 17 نویسنده: ویرایشگر سایت زمان انتشار: 08-06-2020 منبع: سایت








اجزای سنسورهای اولتراسونیک که باید فهرست شوند . هنگام استفاده از اولتراسونیک برای ساخت رادار آردوینو
برد آردوینو (من از آردوینو Uno استفاده می کنم)
سروو موتور (mg-996)
سنسور اولتراسونیک HC-SR04
BreadboardJumper
مرحله 1:
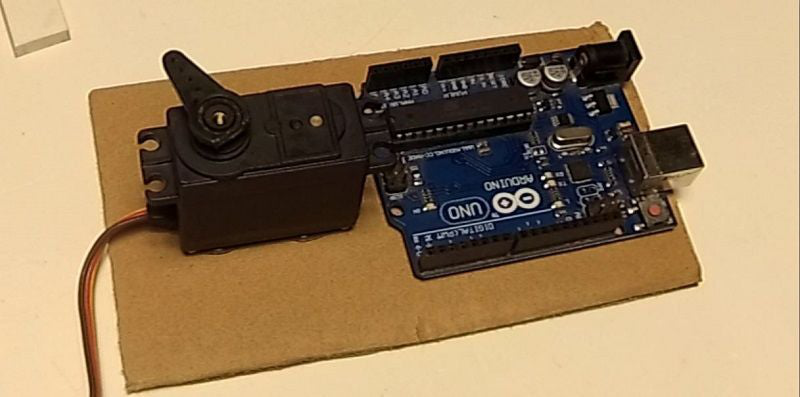
ابتدا باید یک تخته کارتی (15 * 8 سانتی متر) را برش دهیم سپس آردوینو و موتور سروو را روی مبدل اولتراسونیک پیزوالکتریک بچسبانیم.
مرحله 2:
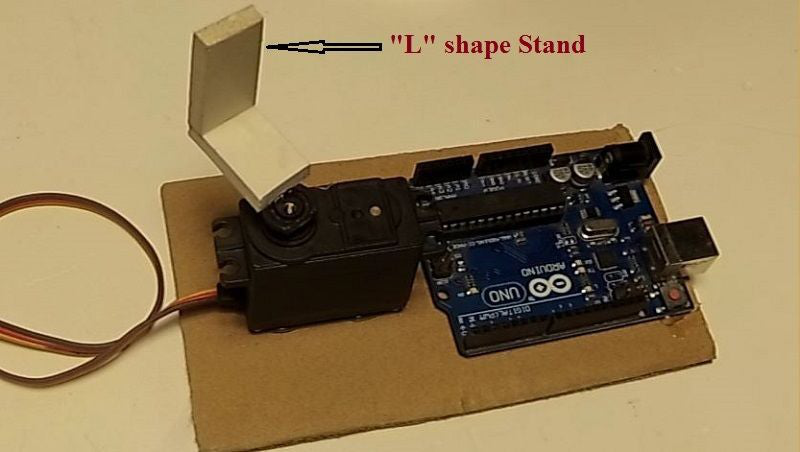
اکنون، ما باید یک براکت به شکل 'L' برای حسگر اولتراسونیک (HC-SR04) بسازیم تا آن را روی موتور سروو نگه داریم.
مرحله 3:

حال باید سنسور سونار را به آردوینو وصل کنیم. هنگام مراقب باشید . اتصال VCC و GND سنسور به ترتیب به 5v و GND آردوینو پس از آن، پایه trig را به 8 و پایه echo را به 9 آردوینو وصل کنید.
مرحله 4:
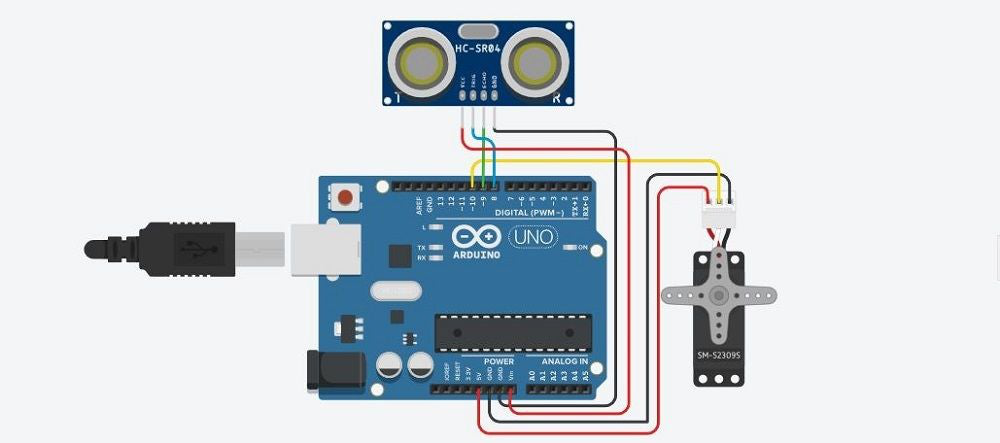
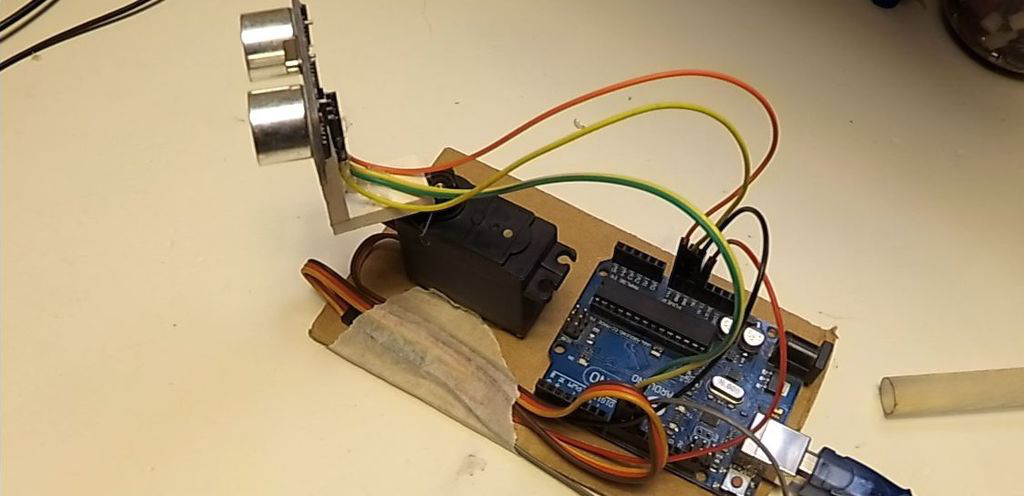
پس از اتصال سنسور مبدل اولتراسونیک به آردوینو، نوبت به اتصال سروو موتور به آن می رسد. باز هم مراقب باشید که VCC و GND سروو موتور را وصل کنید. سیگنال سروو را به پایه 10 آردوینو وصل کنید.
مرحله 5: نرم افزار مورد نیاز برای رادار آردوینو:
برای اجرای پروژه رادار به arduino IDE و Processing IDE نیاز دارید.
پردازش IDE مقدار ارسال شده از arduino را دریافت می کند و ناحیه هدف (علامت قرمز) را توضیح می دهد. برای دانلود آنها به لینک مراجعه کنید.
IDE پردازش: https://processing.org/download/support.html
Arduino IDE: https://www.arduino.cc/en/main/software
مرحله 6: کد آردوینو:
#includeconst int TriggerPin = 8;
const int EchoPin = 9;
const int motorSignalPin = 10;
const int startingAngle = 90;
const int minimumAngle = 6;
const int maximumAngle = 175;
const int rotationSpeed = 1;
سروو موتور؛
تنظیم خالی (باطل)
{pinMode(TriggerPin، OUTPUT)؛
pinMode (EchoPin، INPUT)؛
motor.attach (motorSignalPin);
Serial.begin (9600);
حلقه خالی (باطل)
{static int motorAngle = startingAngle;
static int motorRotateAmount = rotationSpeed;
motor.write (motorAngle);
تاخیر (10);
خروجی سریال (motorAngle, CalculateDistance());
motorAngle + = motorRotateAmount;
(motorAngle '= minimalAngle || motorAngle' = maximumAngle) {motorRotateAmount = -motorRotateAmount;
int CalculateDistance (باطل)
{digitalWrite(TriggerPin، HIGH);
تاخیر میکرو ثانیه (10)؛
digitalWrite (TriggerPin، LOW)؛
طولانی مدت = pulseIn (EchoPin، HIGH)؛
فاصله شناور = مدت زمان * 0.017F;
بازگشت int (فاصله)؛
Void SerialOutput (زاویه ثابت، فاصله بین ثابت)
String angleString = رشته (زاویه);
String distanceString = String(distance);
Serial.println(angleString + ',' + distanceString);
مرحله 7: مدیریت IDE:
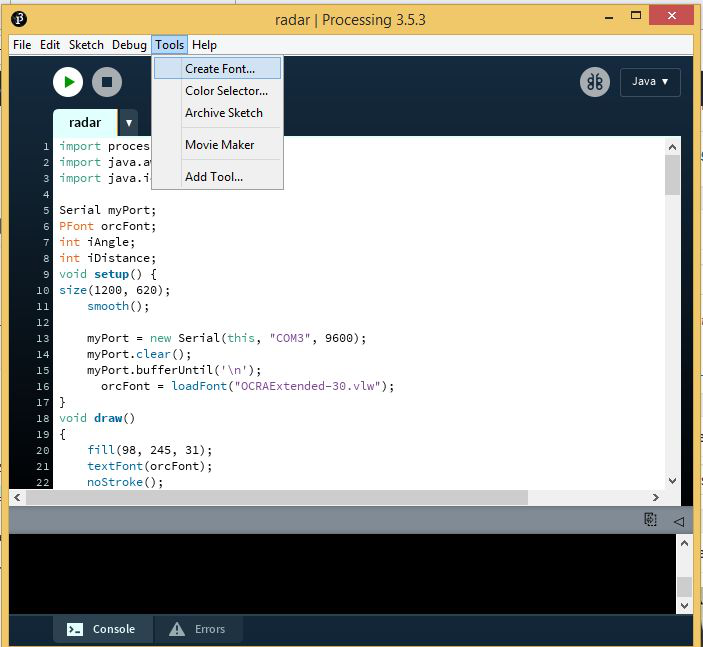
ما می توانیم از IDE پردازش برای یافتن آسان هر شی در محدوده (40 سانتی متر) استفاده کنیم. اگر IDE روی رایانه شخصی شما وجود ندارد، لطفاً آن را دانلود کنید. قبل از استفاده از این IDE، باید فونت را پیکربندی کنیم.
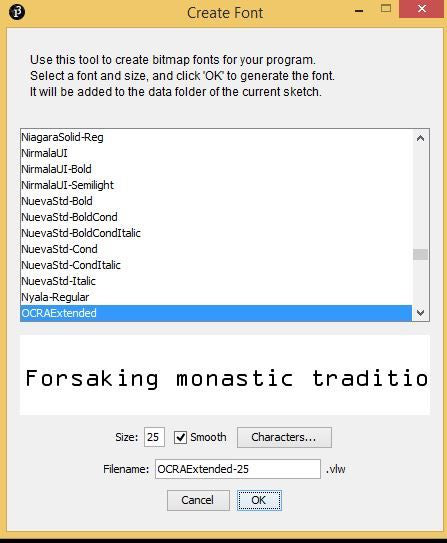
برای این کار باید فایل 'OCRAEXT.TTF' واقع در Radar.zip را نصب کنیم. سپس، به tools/create Font بروید. 'OCRAExtended' را از لیست انتخاب کنید، اندازه قلم 25 را انتخاب کنید و روی 'OK' کلیک کنید.
مرحله 8:
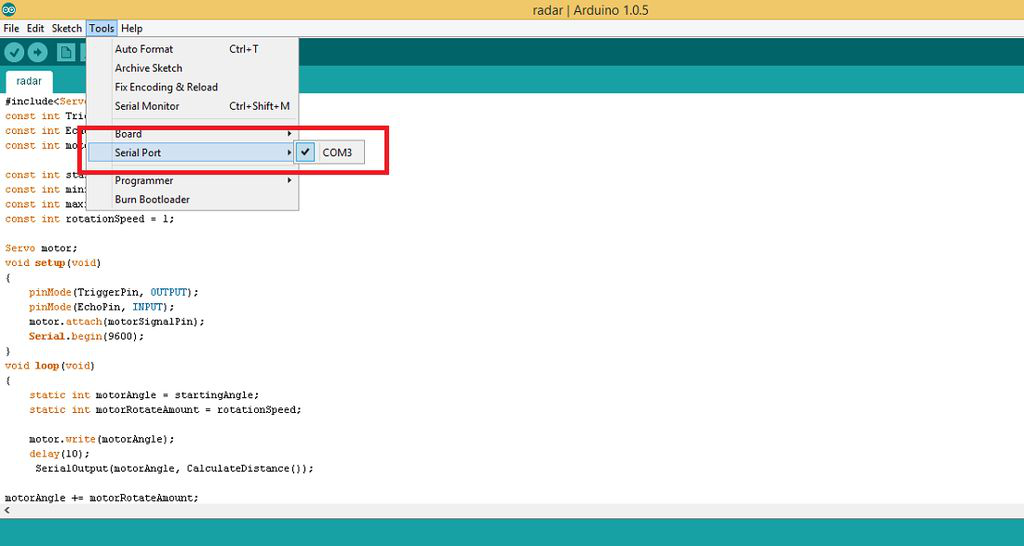
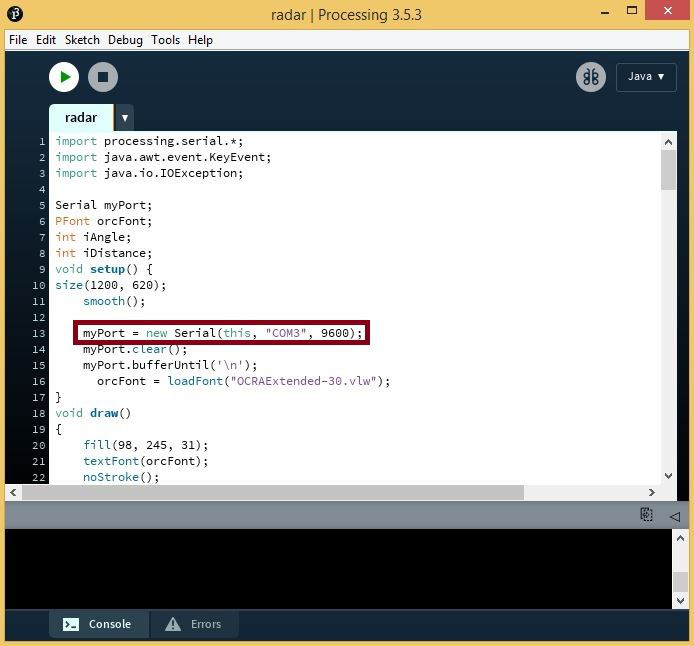
اکنون باید شماره پورت COM را پیدا کنیم. به Arduino IDE رفته و پورت Com را پیدا کنید (COM3 در عکس). شماره پورت COM را در خط 13 کد پردازش (COM3 در عکس) قرار دهید.
مرحله 9:
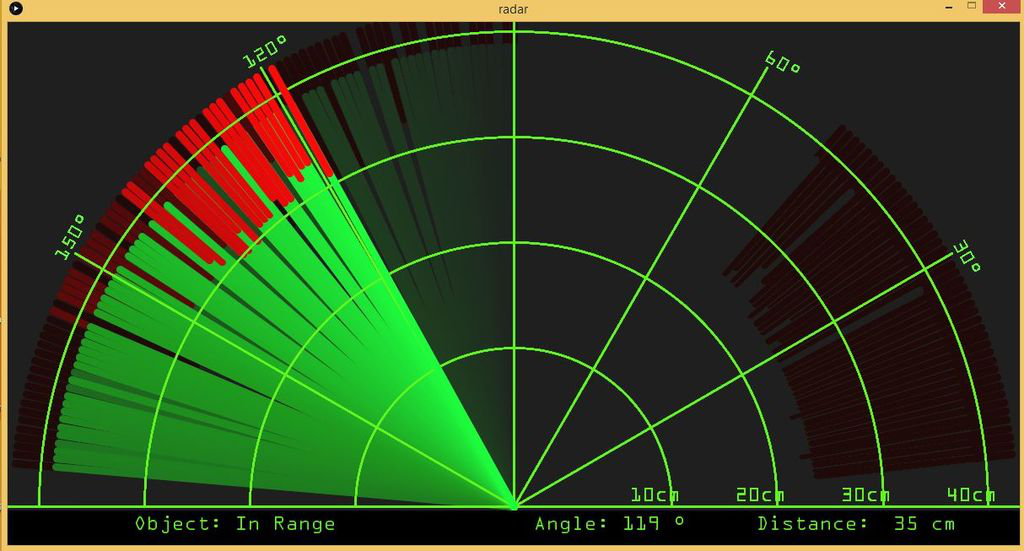
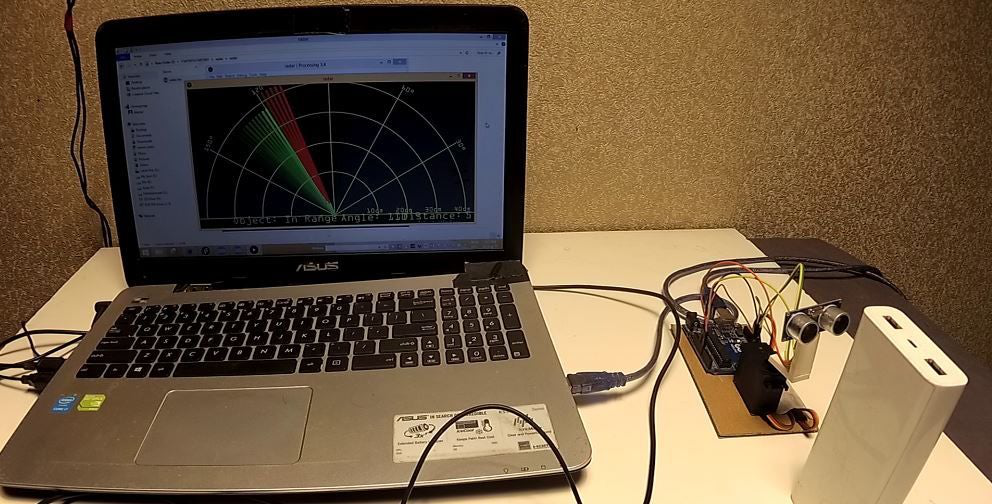
در نهایت، با فشار دادن دکمه 'Run' یک پنجره پردازش نمایش داده می شود. زاویه سروو رادار و فاصله جسم سنسور مبدل اولتراسونیک پیزوالکتریک را نشان می دهد.






 Tech Co,.Ltd")