Language



























Vizualizări: 17 Autor: Editor site Ora publicării: 2020-06-08 Origine: Site








Senzorii componente cu ultrasunete care trebuie enumerați atunci când se utilizează ultrasunete pentru a face radar arduino.
Placa Arduino (folosesc arduino Uno)
Servomotor (mg-996)
Senzor ultrasonic HC-SR04
Breadboard Jumper
Pasul 1:
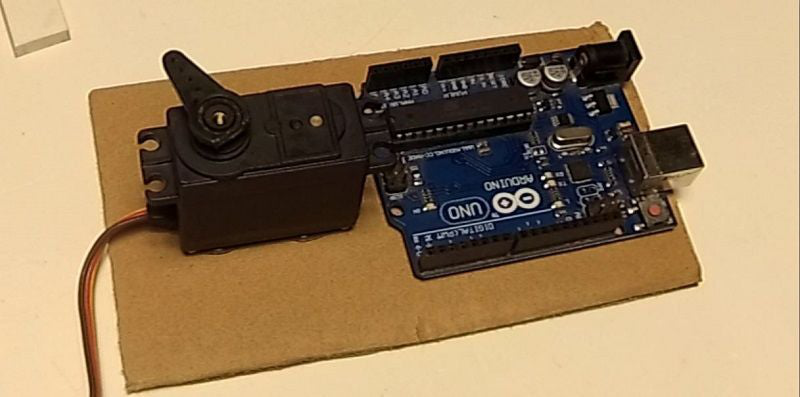
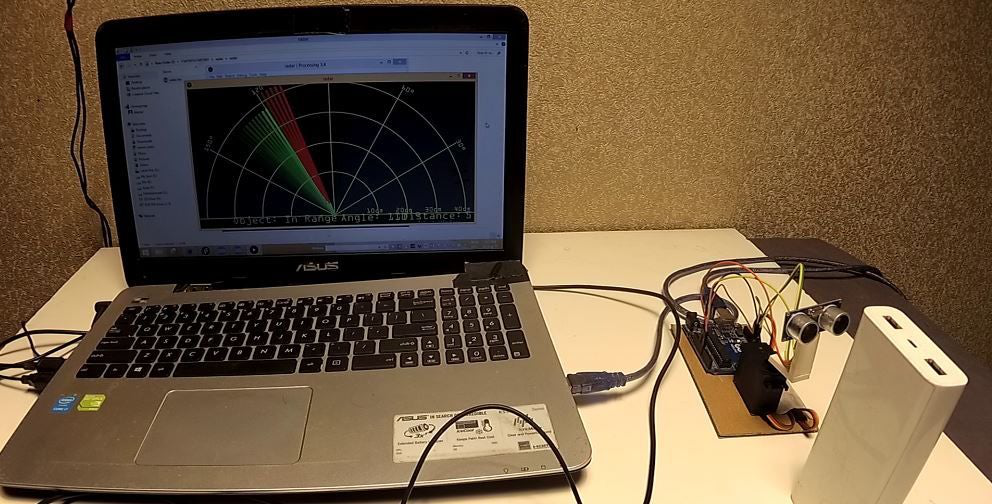
„În primul rând, trebuie să tăiem o placă de card (15cm * 8cm). Apoi, lipim arduino și servomotorul pe traductorul ultrasonic piezoelectric.
Pasul 2:
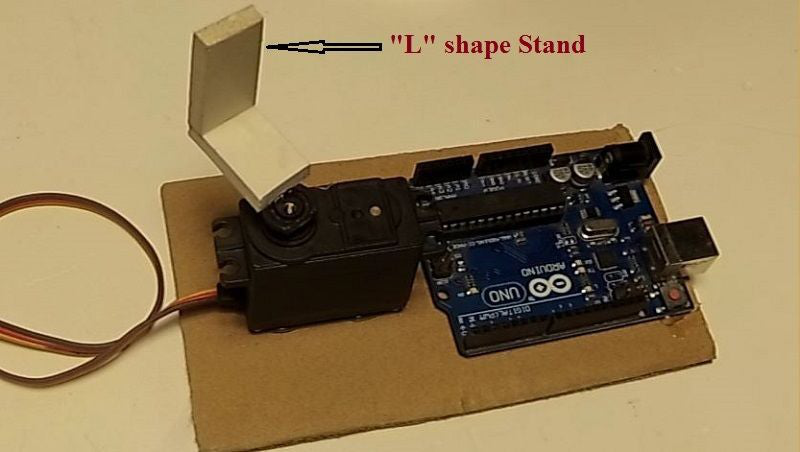
Acum, trebuie să facem un suport în formă de 'L' pentru senzorul cu ultrasunete (HC-SR04) pentru a-l menține pe servomotor.
Pasul 3:

Acum, trebuie să conectăm senzorul sonar la arduino. Aveți grijă când conectați VCC și GND ale senzorului la 5v și, respectiv, GND al arduino. După aceea, conectați pinul de declanșare la 8 și pinul ecou la 9 al arduino.
Pasul 4:
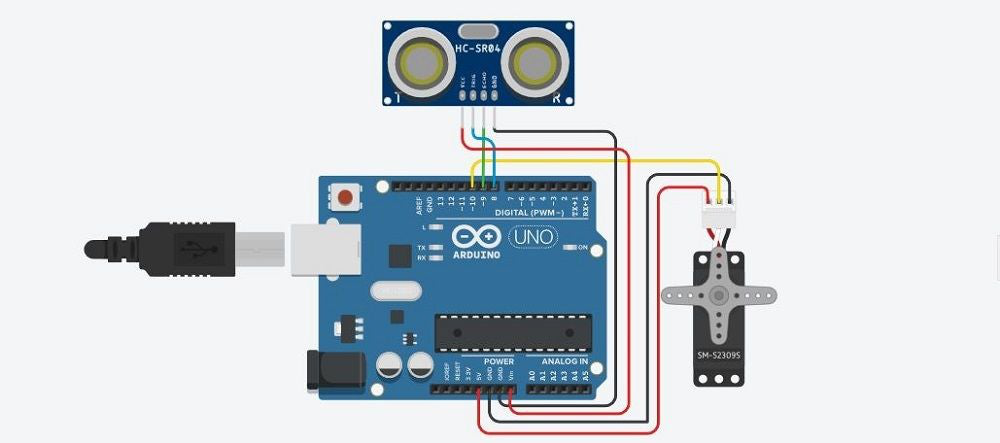
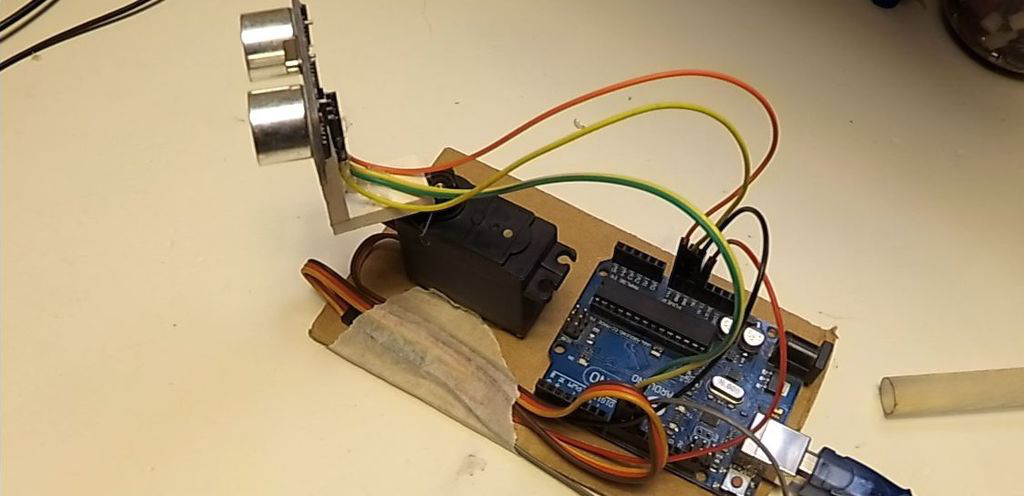
După conectarea senzorului transductorului cu ultrasunete la arduino, este timpul să conectați servomotorul la acesta. Din nou, aveți grijă să conectați VCC și GND ale servomotorului. Conectați semnalul servo la pinul 10 al arduino.
Pasul 5: Software-ul necesar pentru radarul Arduino:
Veți avea nevoie de IDE arduino și IDE de procesare pentru a-l rula proiectul radar.
Procesarea IDE va primi valoarea trimisă de la arduino și va explica zona țintă (marca roșie). Urmați linkul pentru a le descărca.
Procesare IDE: https://processing.org/download/support.html
Arduino IDE: https://www.arduino.cc/en/main/software
Pasul 6: codul Arduino:
#includeconst int TriggerPin = 8;
const int EchoPin = 9;
const int motorSignalPin = 10;
const int startingAngle = 90;
const int minimumAngle = 6;
const int maximumAngle = 175;
const int rotationSpeed = 1;
servomotor;
void setup (void)
{pinMode(TriggerPin, OUTPUT);
pinMode (EchoPin, INPUT);
motor.attach (motorSignalPin);
Serial.begin (9600);
buclă goală (void)
{static int motorAngle = startingAngle;
static int motorRotateAmount = rotationSpeed;
motor.scriere (motorAngle);
Întârziere (10);
SerialOutput (motorAngle, CalculateDistance());
motorAngle + = motorRotateAmount;
(motorAngle '= minimumAngle || motorAngle' = maximumAngle) {motorRotateAmount = -motorRotateAmount;
int CalculateDistance (void)
{digitalWrite(TriggerPin, HIGH);
delayMicrosecunde (10);
digitalWrite (TriggerPin, LOW);
durată lungă = pulseIn (EchoPin, HIGH);
distanta de flotare = durata * 0,017F;
return int (distanta);
void SerialOutput (unghi const int, distanță const int)
String angleString = String(unghi);
String distanceString = String(distanta);
Serial.println(angleString + ',' + distanceString);
Pasul 7: Gestionați IDE-ul:
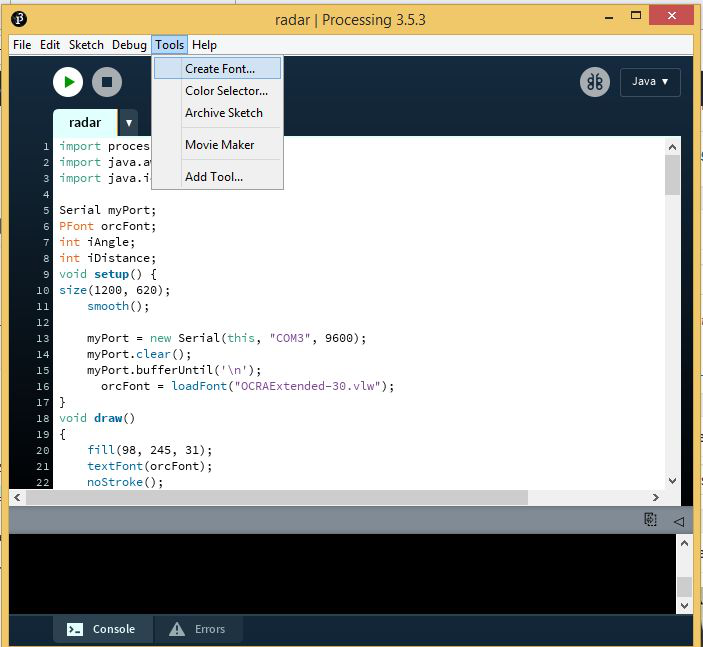
Putem folosi IDE-ul de procesare pentru a găsi cu ușurință orice obiect în raza de acțiune (40 cm). Dacă nu există un IDE pe computer, vă rugăm să îl descărcați. Înainte de a folosi acest IDE, trebuie să configuram fontul.
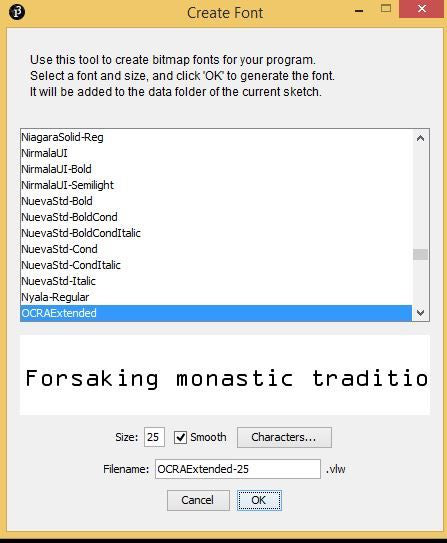
Pentru a face acest lucru, trebuie să instalăm fișierul 'OCRAEXT.TTF' aflat în Radar.zip. Apoi, accesați instrumente/creați font. Selectați 'OCRAExtended' din listă, selectați o dimensiune de font de 25 și faceți clic pe 'OK'.
Pasul 8:
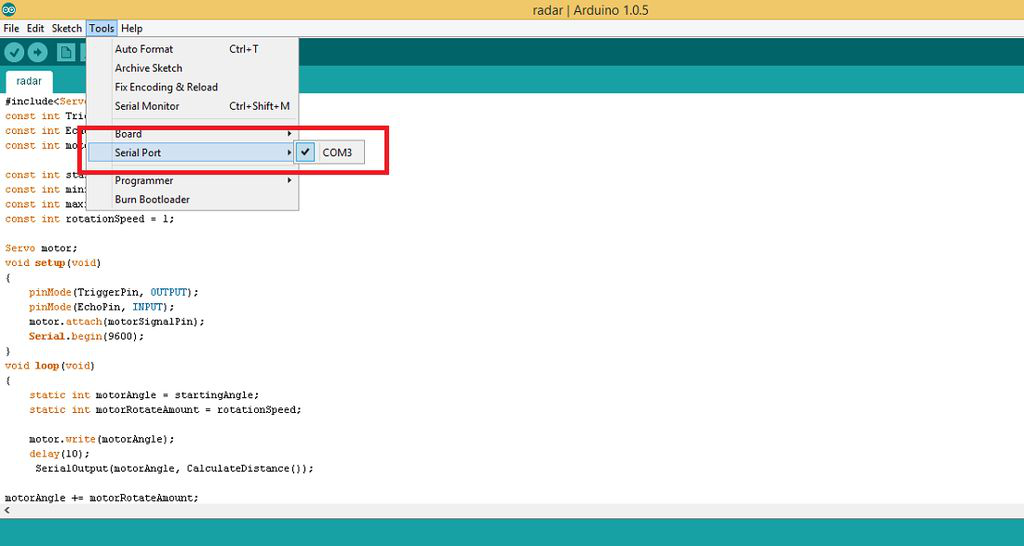
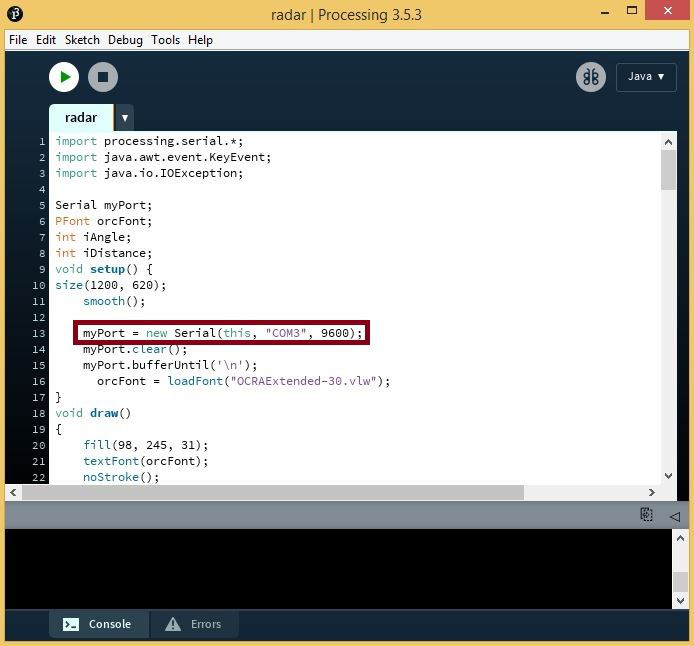
Acum, trebuie să găsim numărul portului COM. Mergeți la Arduino IDE și găsiți portul Com (COM3 în fotografie). Plasați numărul portului COM pe linia 13 a codului de procesare (COM3 în fotografie).
Pasul 9:
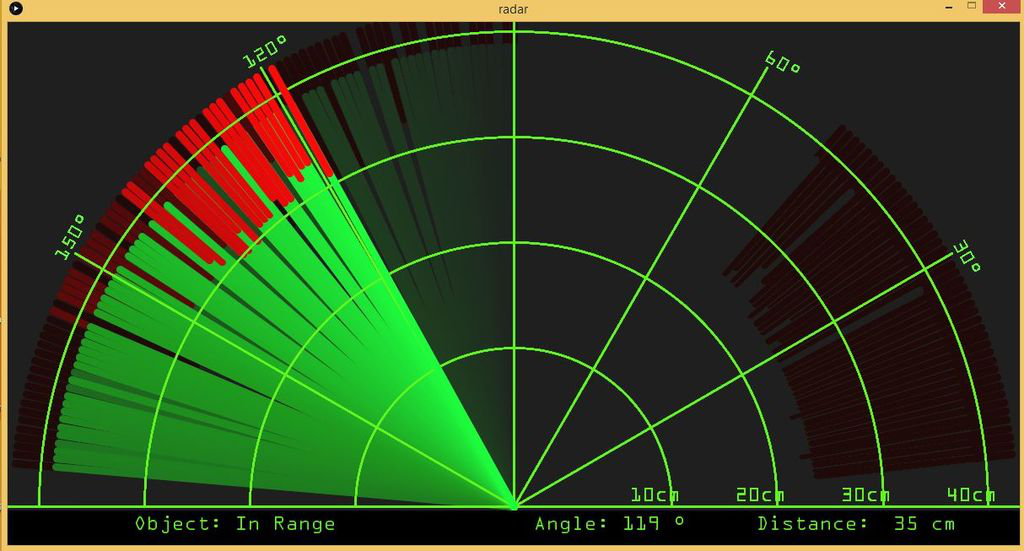
În cele din urmă, apăsând butonul 'Run' va afișa o fereastră de procesare. Acesta va afișa unghiul servo radar și distanța obiectului senzorului piezoelectric cu ultrasunete.






 Tech Co,.Ltd")