Language



























Visualizzazioni: 17 Autore: Editor del sito Orario di pubblicazione: 2020-06-08 Origine: Sito








I sensori componenti a ultrasuoni che devono essere elencati quando si utilizzano gli ultrasuoni per realizzare il radar Arduino.
Scheda Arduino (io uso Arduino Uno)
Servomotore (mg-996)
Sensore ad ultrasuoni HC-SR04
BreadboardJumper
Passaggio 1:
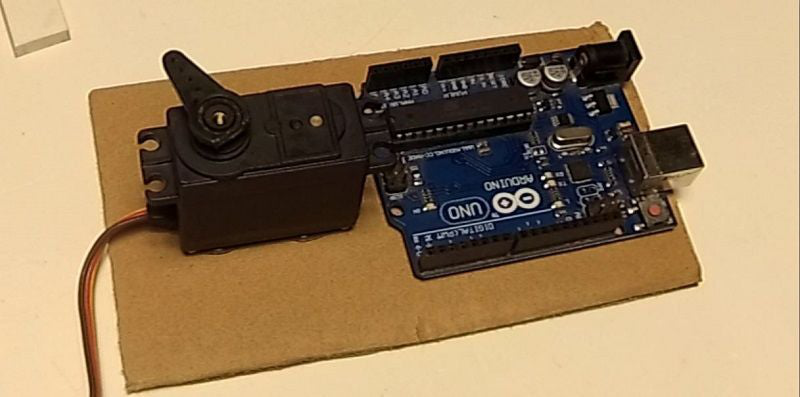
'Per prima cosa dobbiamo tagliare un cartoncino (15 cm * 8 cm). Quindi, incollare l'arduino e il servomotore sul trasduttore ultrasonico piezoelettrico
Passaggio 2:
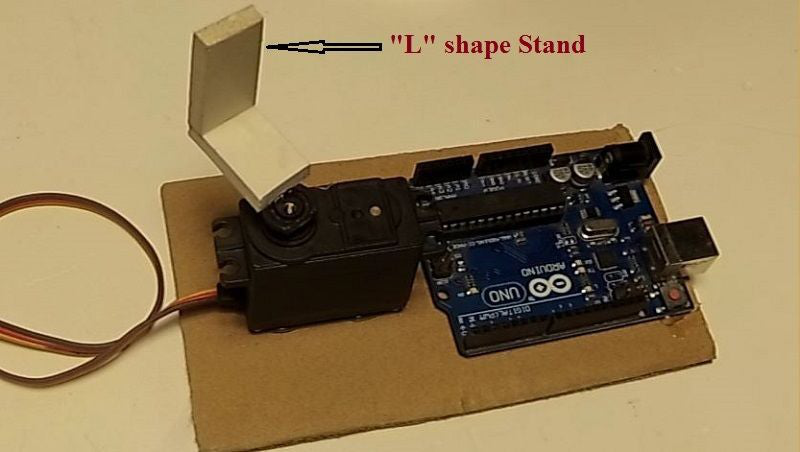
Ora dobbiamo realizzare una staffa a forma di 'L' per il sensore a ultrasuoni (HC-SR04) per mantenerlo sul servomotore.
Passaggio 3:

Ora dobbiamo collegare il sensore sonar all'arduino. Fare attenzione quando si collegano VCC e GND del sensore rispettivamente a 5 V e GND di Arduino. Successivamente, collega il pin trig a 8 e il pin echo a 9 di arduino.
Passaggio 4:
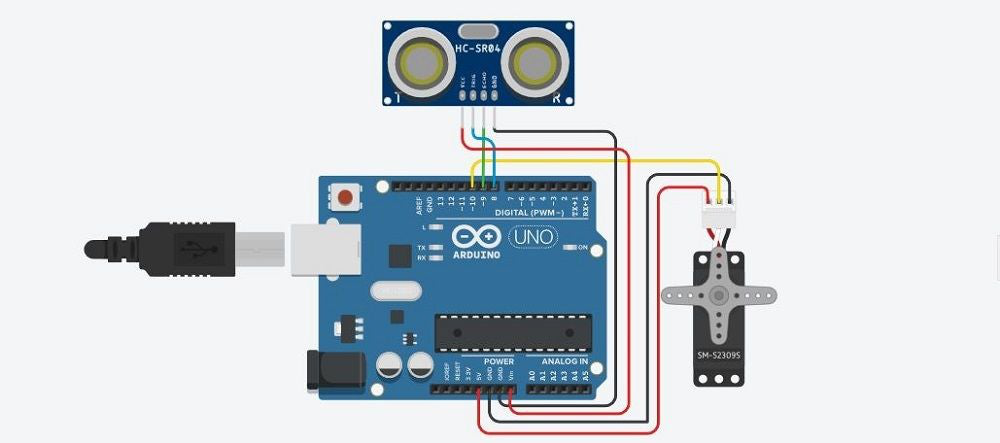
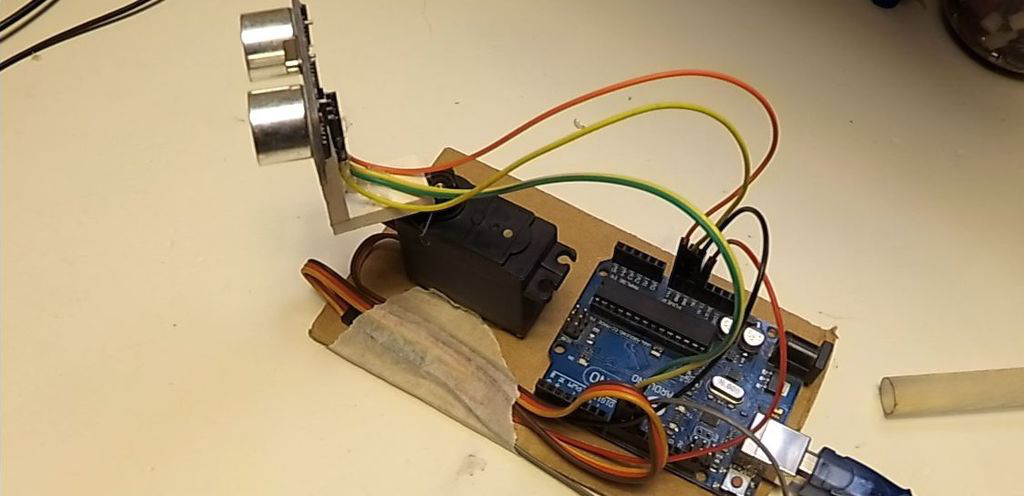
Dopo aver collegato il sensore del trasduttore a ultrasuoni ad Arduino, è il momento di collegarvi il servomotore. Ancora una volta, fare attenzione a collegare VCC e GND del servomotore. Collega il segnale del servo al pin 10 di Arduino.
Passaggio 5: software richiesto per il radar Arduino:
Avrai bisogno dell'IDE Arduino e dell'IDE di elaborazione per eseguire il progetto radar.
L'IDE di elaborazione otterrà il valore inviato da Arduino e spiegherà l'area di destinazione (segno rosso). Segui il link per scaricarli.
IDE di elaborazione: https://processing.org/download/support.html
IDE di Arduino: https://www.arduino.cc/en/main/software
Passaggio 6: codice Arduino:
#includeconst int TriggerPin = 8;
const int EchoPin = 9;
const int motorSignalPin = 10;
const int angolo iniziale = 90;
const int angolo minimo = 6;
const int angolo massimo = 175;
const int rotazioneVelocità = 1;
servomotore;
configurazione nulla (void)
{pinMode(TriggerPin, OUTPUT);
pinMode (EchoPin, INPUT);
motor.attach (motorSignalPin);
Inizio seriale (9600);
ciclo vuoto (vuoto)
{statico int angolo motore = angolo iniziale;
static int motorRotateAmount = rotazioneVelocità;
motore.write (angolomotore);
Ritardo (10);
SerialOutput (motorAngle, CalculateDistance());
angolomotore + = importoRotazionemotore;
(Angolomotore'=Angolo minimo ||Angolomotore' =Angolo massimo) {MotoreRotateAmount = -motorRotateAmount;
int CalculateDistance (vuoto)
{digitalWrite(TriggerPin, ALTO);
ritardoMicrosecondi (10);
digitalWrite (TriggerPin, BASSO);
lunga durata = impulsoIn (EchoPin, ALTO);
distanza galleggiante = durata * 0,017F;
return int (distanza);
void SerialOutput (angolo int costante, distanza int costante)
StringaangoloStringa = Stringa(angolo);
Stringa distanzaStringa = Stringa(distanza);
Serial.println(angleString + ',' + distanceString);
Passaggio 7: gestire l'IDE:
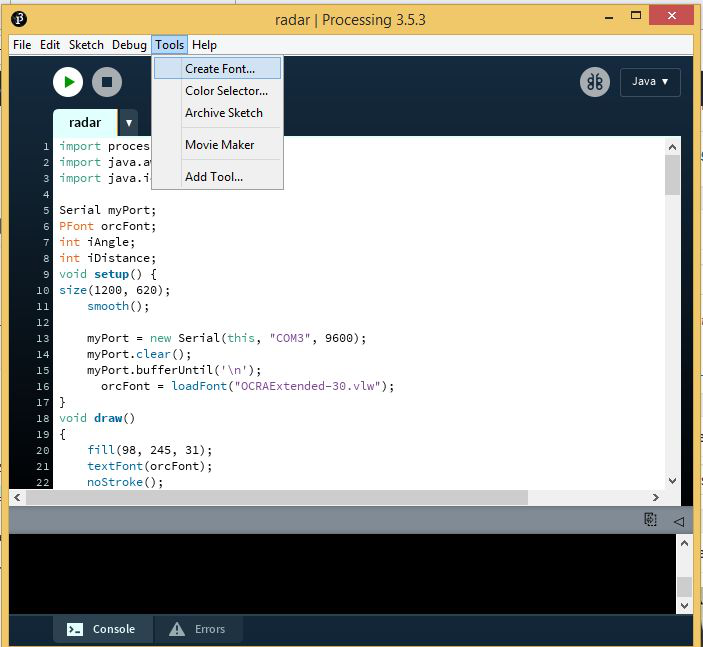
Possiamo utilizzare l'IDE di elaborazione per trovare facilmente qualsiasi oggetto nel raggio di 40 cm. Se non è presente l'IDE sul tuo PC, scaricalo. Prima di utilizzare questo IDE, dobbiamo configurare il carattere.
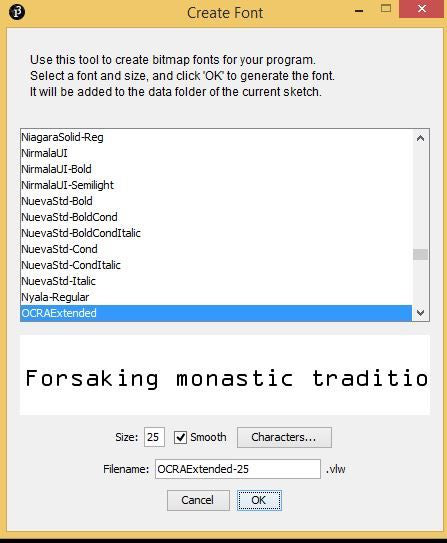
Per fare ciò, dobbiamo installare il file 'OCRAEXT.TTF' situato in Radar.zip. Quindi vai su strumenti/crea carattere. Selezionare 'OCRAExtended' dall'elenco, selezionare una dimensione carattere pari a 25 e fare clic su 'OK'.
Passaggio 8:
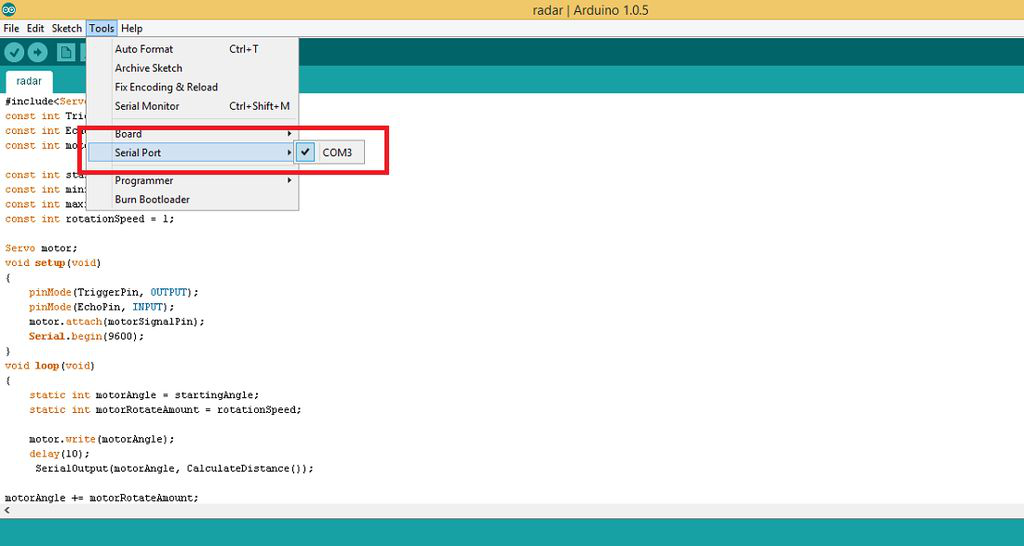
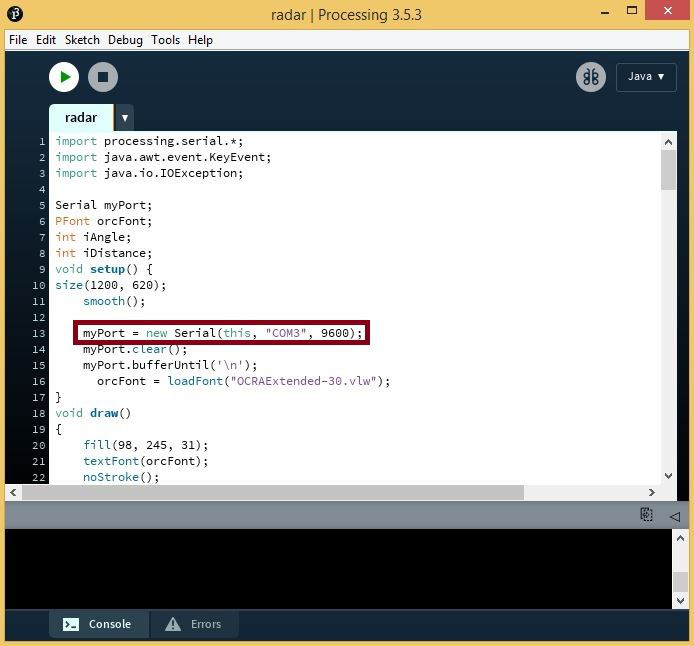
Ora dobbiamo trovare il numero della porta COM. Vai all'IDE di Arduino e trova la porta Com (COM3 nella foto). Inserire il numero della porta COM nella riga 13 del codice di elaborazione (COM3 nella foto).
Passaggio 9:
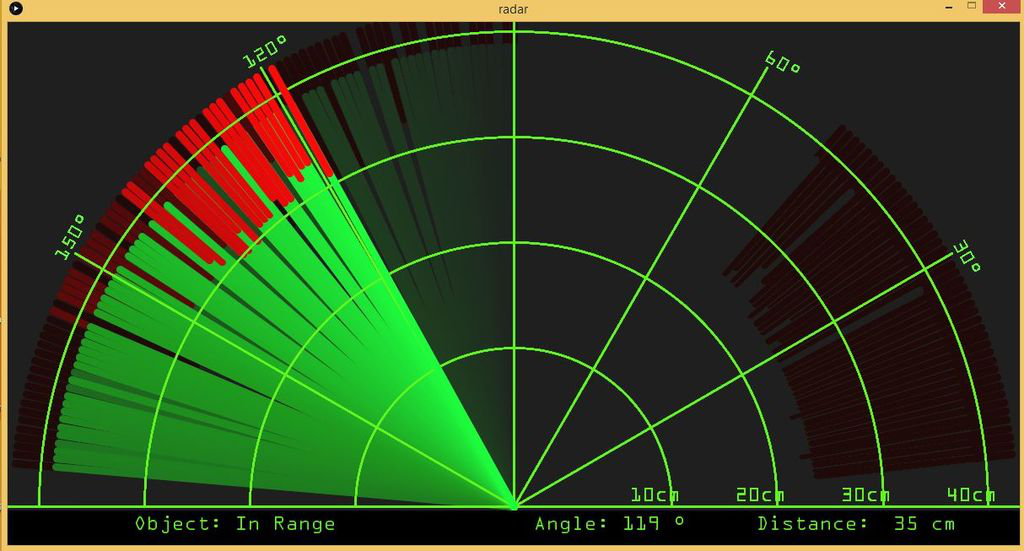
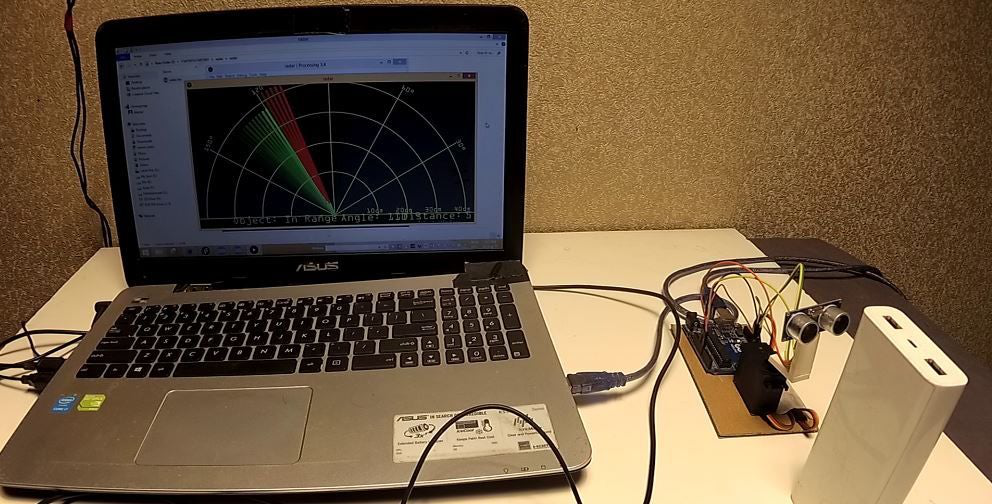
Infine, premendo il pulsante 'Esegui' verrà visualizzata una finestra di elaborazione. Mostrerà l'angolo del servo radar e la distanza dell'oggetto del sensore del trasduttore ultrasonico piezoelettrico.






 Tech Co,.Ltd")