Language



























Kyke: 17 Skrywer: Werfredakteur Publiseertyd: 2020-06-08 Oorsprong: Werf








Die komponent ultrasoniese sensors wat gelys moet word wanneer gebruik ultrasoniese om arduino radar te maak.
Arduino Board (ek gebruik arduino Uno)
Servomotor (mg-996)
HC-SR04 ultrasoniese sensor
Breadboard Jumper
Stap 1:
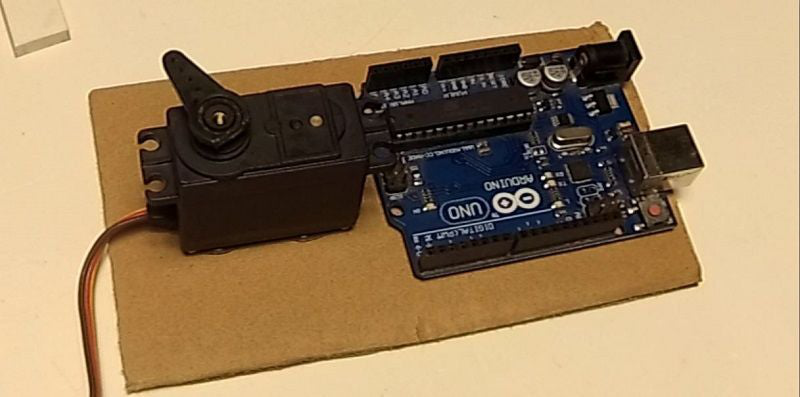
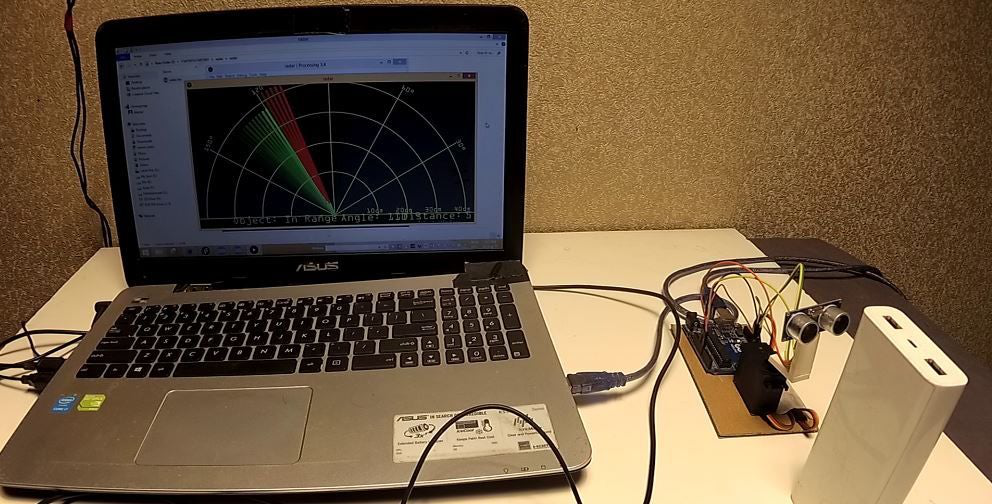
'Eers moet ons 'n kaartbord (15cm * 8cm) sny. Plak dan die arduino en servomotor op piëso-elektriese ultrasoniese transducer vas.
Stap 2:
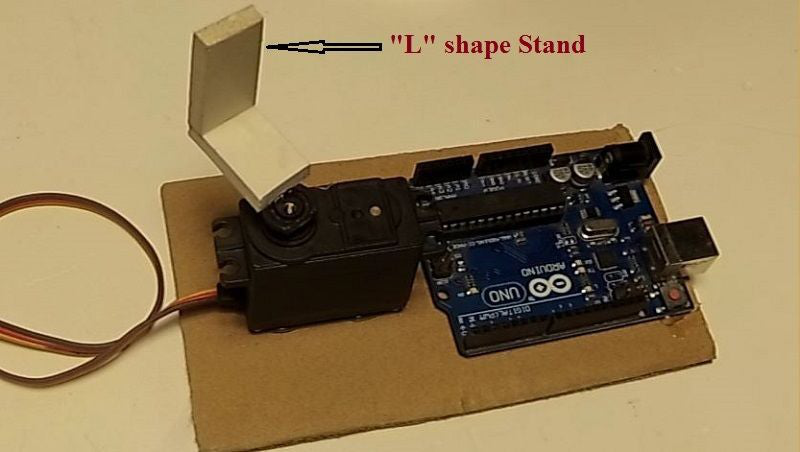
Nou moet ons 'n 'L'-vormige hakie maak vir die ultrasoniese sensor (HC-SR04) om dit op die servomotor te hou.
Stap 3:

Nou moet ons die sonarsensor aan die arduino koppel. Wees versigtig wanneer word . die VCC en GND van die sensor aan onderskeidelik 5v en GND van arduino verbind Koppel daarna die trig-pen aan 8 en die eggo-pen aan 9 van arduino.
Stap 4:
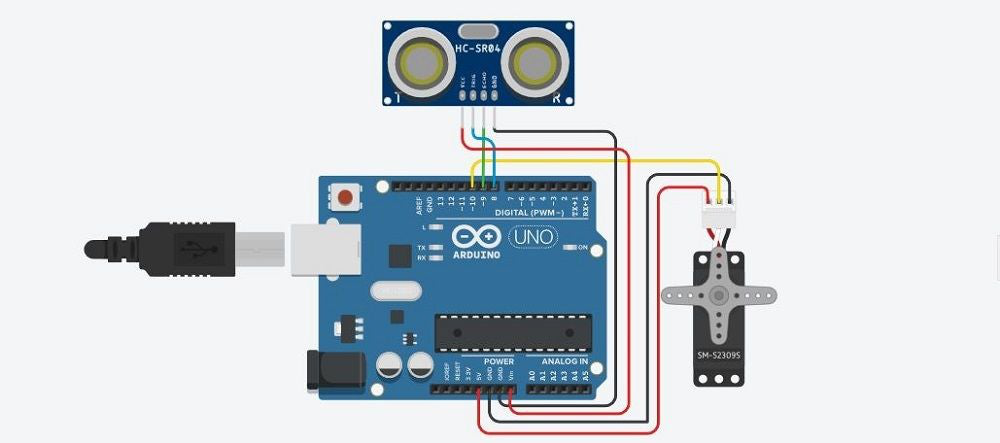
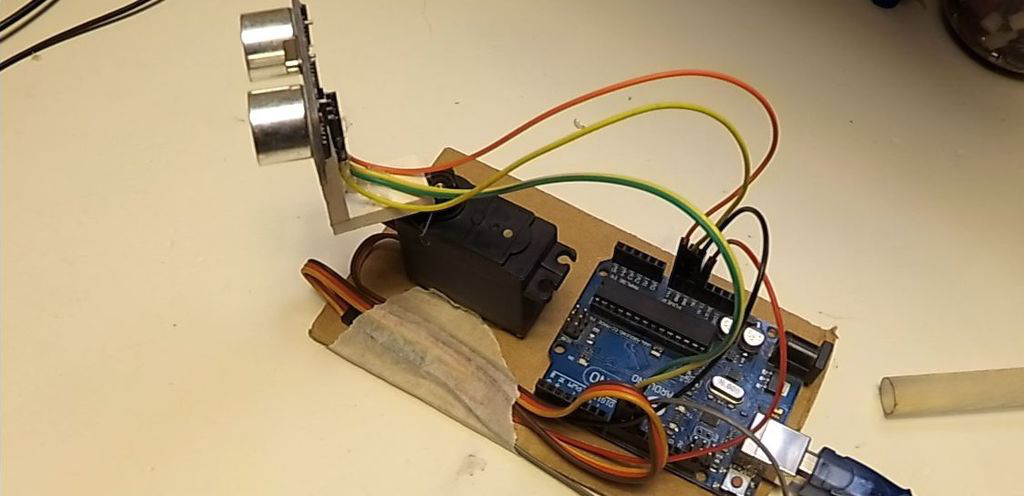
Nadat die ultrasoniese transducer-sensor aan die arduino gekoppel is, is dit tyd om die servomotor daaraan te koppel. Weereens, wees versigtig om die VCC en GND van die servomotor te verbind. Koppel die servosein aan pen 10 van arduino.
Stap 5: Sagteware benodig vir Arduino-radar:
Jy sal arduino IDE en Processing IDE nodig hê om dit radarprojek uit te voer .
Die verwerking van IDE sal die waarde van arduino gestuur kry en die teikenarea (rooi merk) verduidelik. Volg die skakel om hulle af te laai.
Verwerking IDE: https://processing.org/download/support.html
Arduino IDE: https://www.arduino.cc/en/main/software
Stap 6: Arduino-kode:
#includeconst int TriggerPin = 8;
const int EchoPin = 9;
const int motorSignalPin = 10;
const int beginhoek = 90;
const int minimumAngle = 6;
const int maksimumhoek = 175;
const int rotationSpeed = 1;
servomotor;
nietige opstelling (leeg)
{pinMode(TriggerPin, UITSET);
pinMode (EchoPin, INPUT);
motor.heg (motorSignalPin);
Serial.begin (9600);
nietige lus (leeg)
{static int motorAngle = beginhoek;
statiese int motorRotateAmount = rotationSpeed;
motor.skryf (motorAngle);
Vertraging (10);
SerialOutput (motorAngle, CalculateDistance());
motorAngle + = motorRotateAmount;
(motorAngle '= minimumAngle || motorAngle' = maximumAngle) {motorRotateAmount = -motorRotateAmount;
int BerekenAfstand (leeg)
{digitalWrite(TriggerPin, HIGH);
vertragingMikrosekondes (10);
digitalWrite (TriggerPin, LOW);
lang duur = pulseIn (EchoPin, HIGH);
dryfafstand = duur * 0.017F;
terugkeer int (afstand);
void SerialOutput (konst int hoek, konstant int afstand)
String angleString = String(hoek);
String afstandString = String(afstand);
Serial.println(hoekString + ',' + afstandString);
Stap 7: Hanteer die IDE:
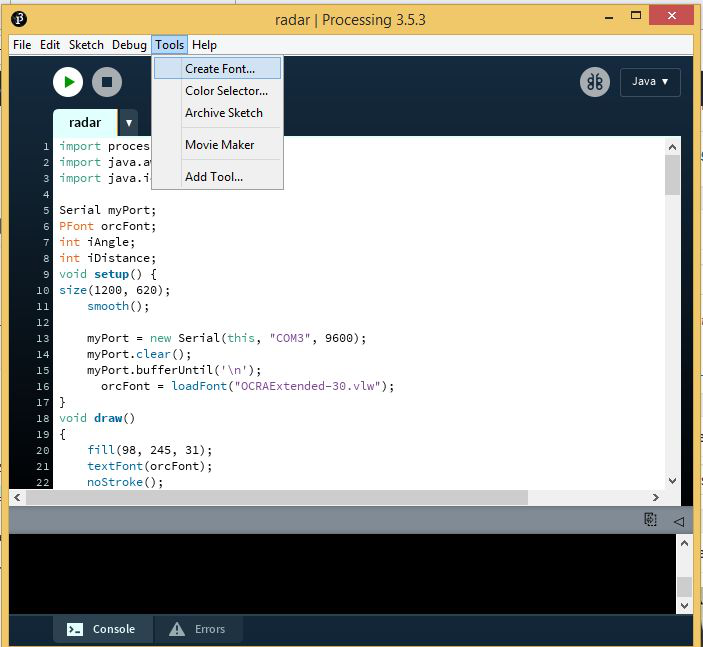
Ons kan die verwerkings-IDE gebruik om maklik enige voorwerp binne die reeks (40 cm) te vind. As daar geen IDE op jou rekenaar is nie, laai dit asseblief af. Voordat ons hierdie IDE gebruik, moet ons die lettertipe konfigureer.
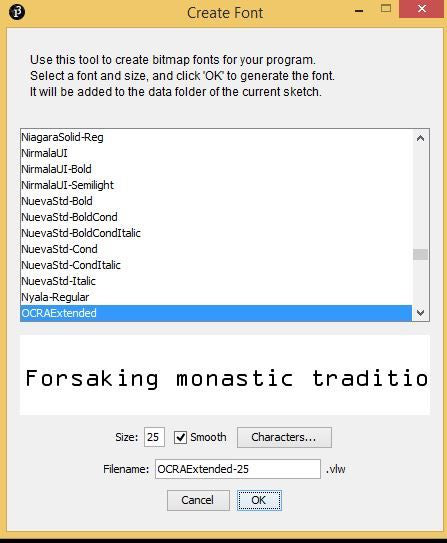
Om dit te doen, moet ons die 'OCRAEXT.TTF'-lêer installeer wat in Radar.zip geleë is. Gaan dan na gereedskap/skep lettertipe. Kies 'OCRAExtended' uit die lys, kies 'n lettergrootte van 25 en klik 'OK'.
Stap 8:
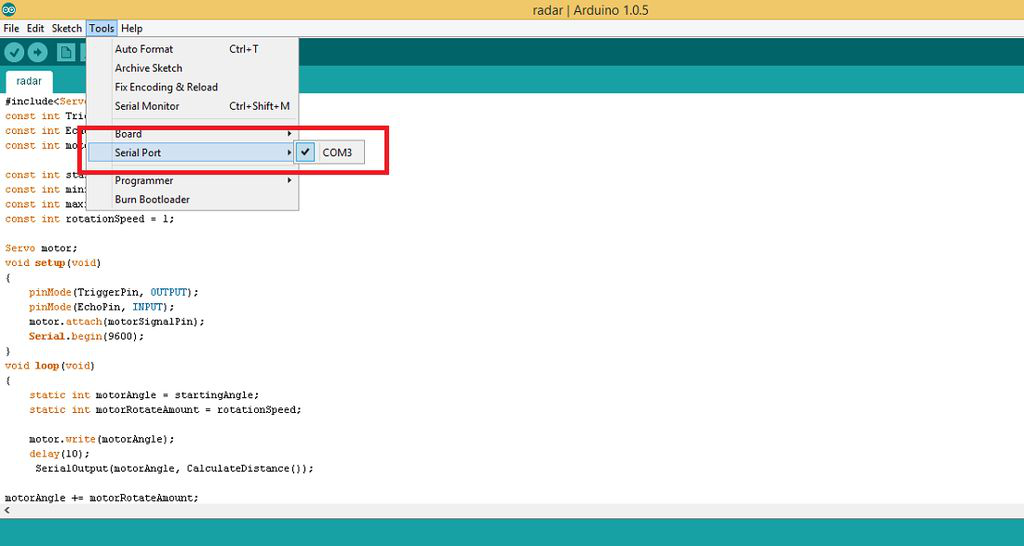
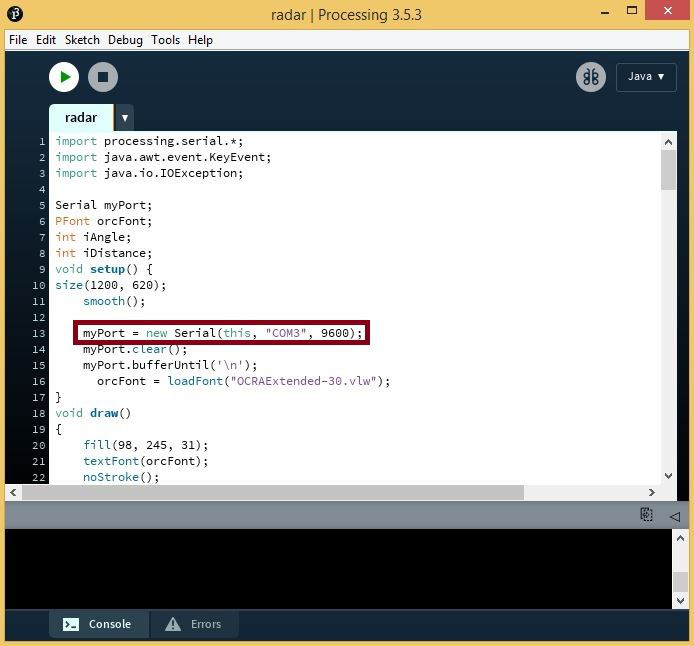
Nou moet ons die COM-poortnommer vind. Gaan na die Arduino IDE en vind die Com-poort (COM3 op die foto). Plaas die COM-poortnommer op reël 13 van die verwerkingskode (COM3 op die foto).
Stap 9:
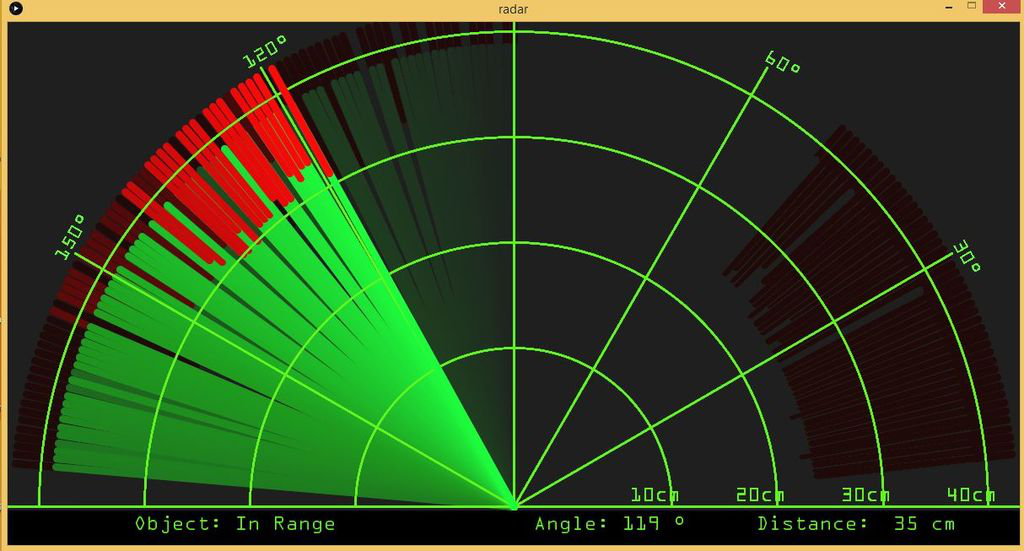
Ten slotte, deur die 'Run'-knoppie te druk, sal 'n verwerkingsvenster vertoon word. Dit sal die radar servohoek en voorwerpafstand van die piëso-elektriese ultrasoniese transducer sensor wys.






 Tech Co,.Ltd")