Language



























Katselukerrat: 17 Tekijä: Site Editor Julkaisuaika: 2020-06-08 Alkuperä: Sivusto








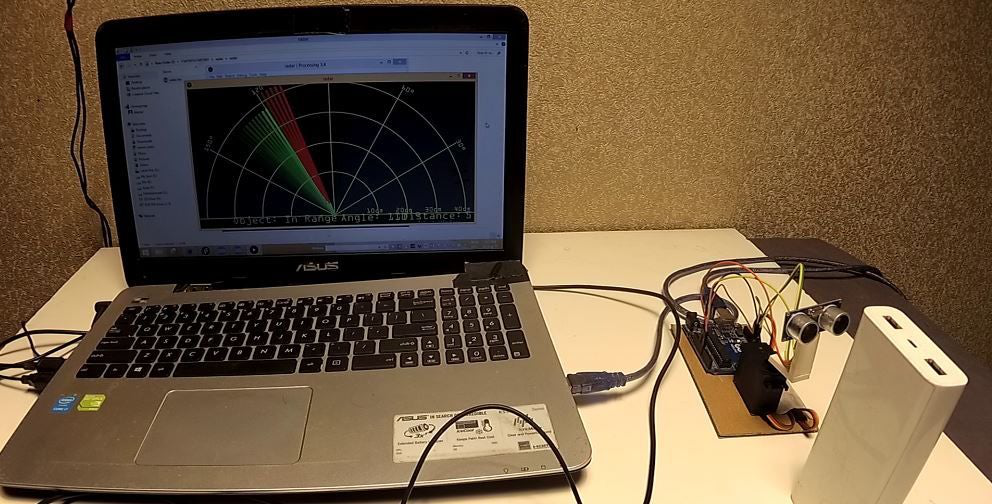
Komponentti -ultraäänianturit , jotka on lueteltava, kun . arduinotutkaa käytetään ultraäänellä
Arduino Board (käytän arduino Unoa)
Servomoottori (mg-996)
HC-SR04 ultraäänianturi
BreadboardJumper
Vaihe 1:
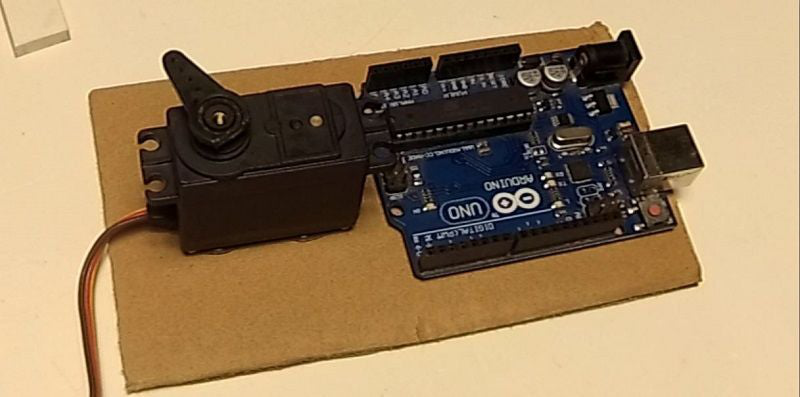
'Ensin meidän on leikattava kartonkilevy (15 cm * 8 cm). Liimaa sitten arduino- ja servomoottori pietsosähköiseen ultraäänianturiin
Vaihe2:
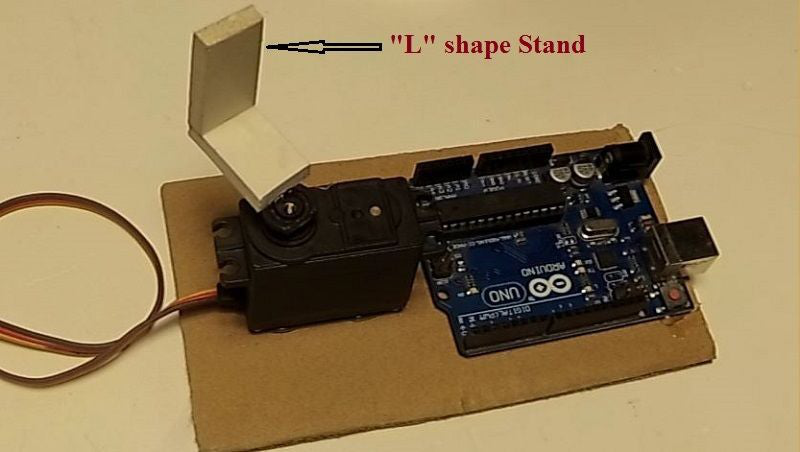
Nyt meidän on tehtävä 'L' muotoinen kiinnike ultraäänianturille (HC-SR04), jotta se pysyy servomoottorissa.
Vaihe 3:

Nyt meidän on yhdistettävä luotainanturi arduinoon. Ole varovainen, kun kytket anturin VCC:n ja GND:n arduinon 5v:iin ja GND:hen. Yhdistä sen jälkeen arduinon laukaisunasta 8:aan ja kaikunasta 9:ään.
Vaihe 4:
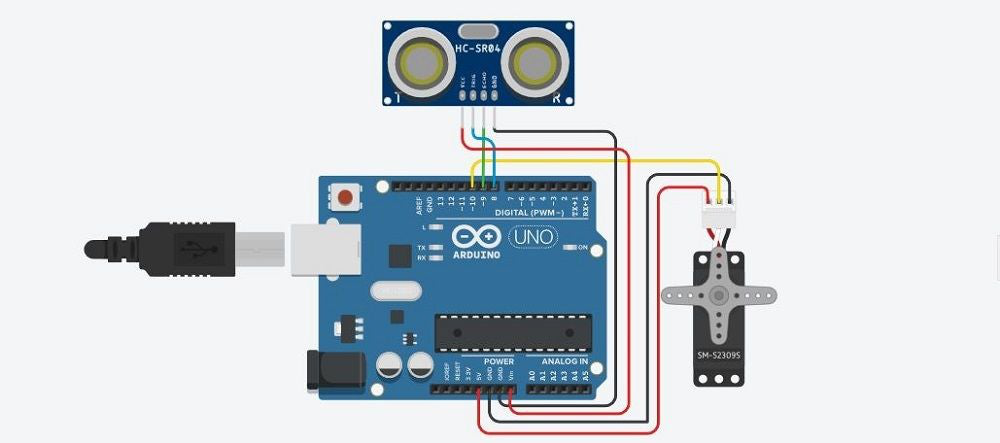
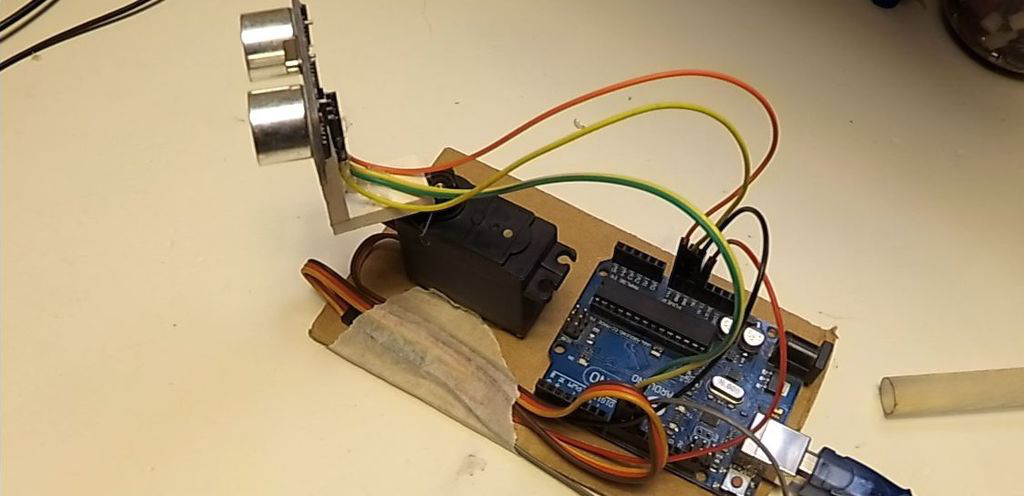
Kun ultraäänianturi on liitetty arduinoon, on aika kytkeä servomoottori siihen. Muista jälleen liittää servomoottorin VCC ja GND. Liitä servosignaali arduinon nastaan 10.
Vaihe 5: Arduino-tutka vaatii ohjelmiston:
Tarvitset arduino IDE:n ja Processing IDE:n tutkaprojektin suorittamiseen .
Käsittely IDE saa arduinolta lähetetyn arvon ja selittää kohdealueen (punainen merkki). Lataa ne napsauttamalla linkkiä.
Käsittely IDE: https://processing.org/download/support.html
Arduino IDE: https://www.arduino.cc/en/main/software
Vaihe 6: Arduino-koodi:
#includeconst int TriggerPin = 8;
const int EchoPin = 9;
const int motorSignalPin = 10;
const int aloituskulma = 90;
const int minimiKulma = 6;
const int maksimiKulma = 175;
const int rotationSpeed = 1;
servo moottori;
mitätön asetus (tyhjä)
{pinMode(TriggerPin, OUTPUT);
pinMode (EchoPin, INPUT);
motor.attach (motorSignalPin);
Serial.begin (9600);
tyhjä silmukka (tyhjä)
{staattinen int motorAngle = aloituskulma;
static int motorRotateAmount = rotationSpeed;
motor.write (motorAngle);
Viive (10);
SerialOutput (motorAngle, CalculateDistance());
motorAngle + = motorRotateAmount;
(motorAngle '= minimiAngle || motorAngle' = suurinAngle) {motorRotateAmount = -motorRotateAmount;
int CalculateDistance (tyhjä)
{digitalWrite(TriggerPin, HIGH);
viivemikrosekuntia (10);
digitalWrite (TriggerPin, LOW);
pitkä kesto = pulseIn (EchoPin, HIGH);
kelluntaetäisyys = kesto * 0,017F;
paluu int (etäisyys);
void SerialOutput (vakio int kulma, vakio int etäisyys)
Merkkijono kulmaString = Merkkijono(kulma);
Merkkijonon etäisyysString = Merkkijono(etäisyys);
Serial.println(kulmamerkkijono + ',' + etäisyysmerkkijono);
Vaihe 7: Käsittele IDE:tä:
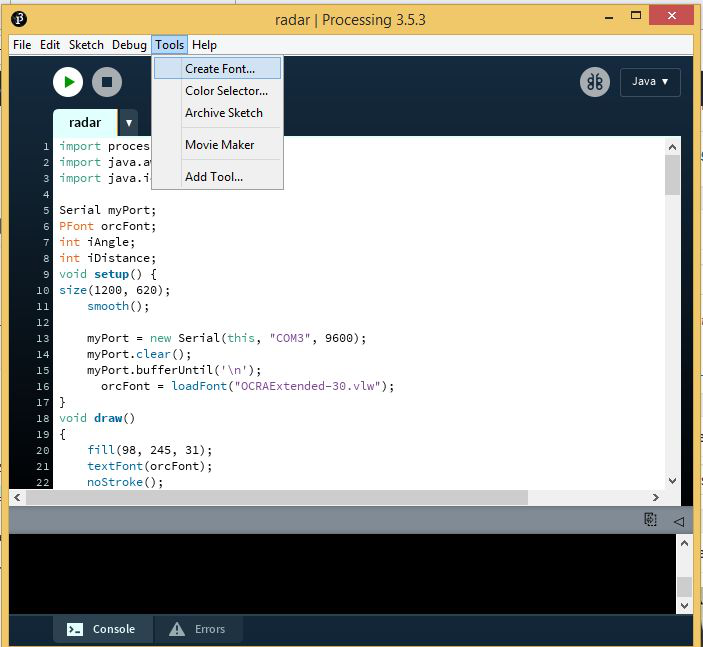
Voimme käyttää prosessointi-IDE:tä löytääksemme helposti minkä tahansa kohteen alueella (40 cm). Jos tietokoneessasi ei ole IDE:tä, lataa se. Ennen tämän IDE:n käyttöä meidän on määritettävä fontti.
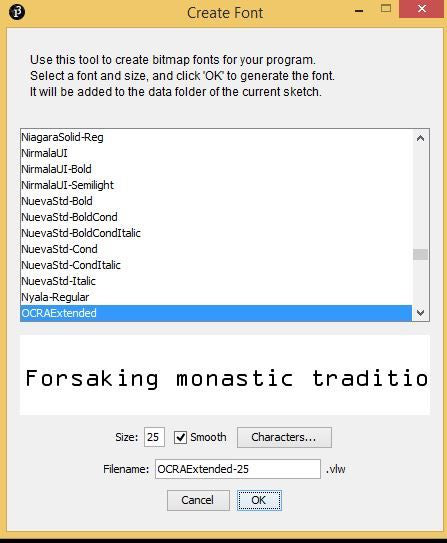
Tätä varten meidän on asennettava 'OCRAEXT.TTF' tiedosto, joka sijaitsee kohteessa Radar.zip. Siirry sitten työkaluihin/luo fontti. Valitse luettelosta 'OCRAExtended', valitse fonttikoko 25 ja napsauta 'OK'.
Vaihe 8:
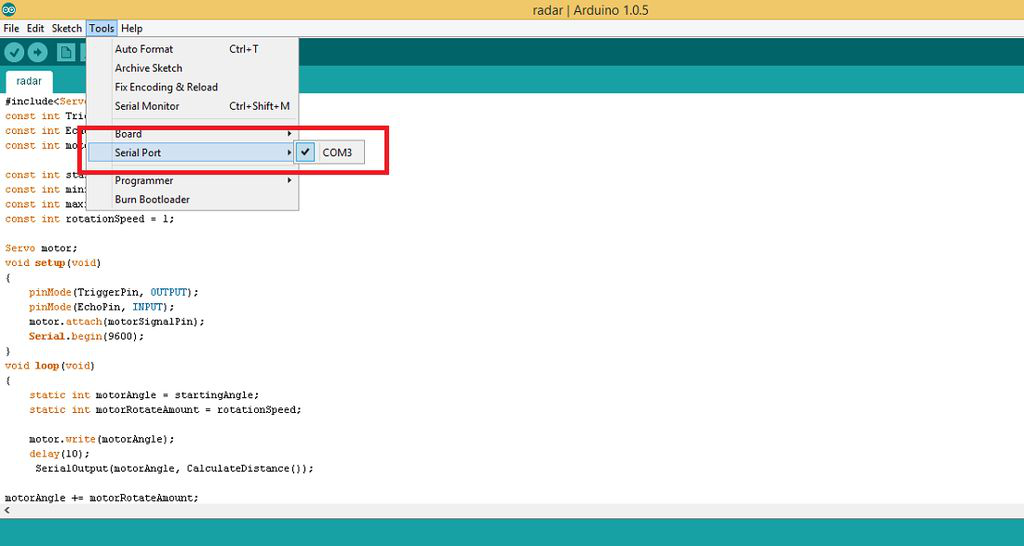
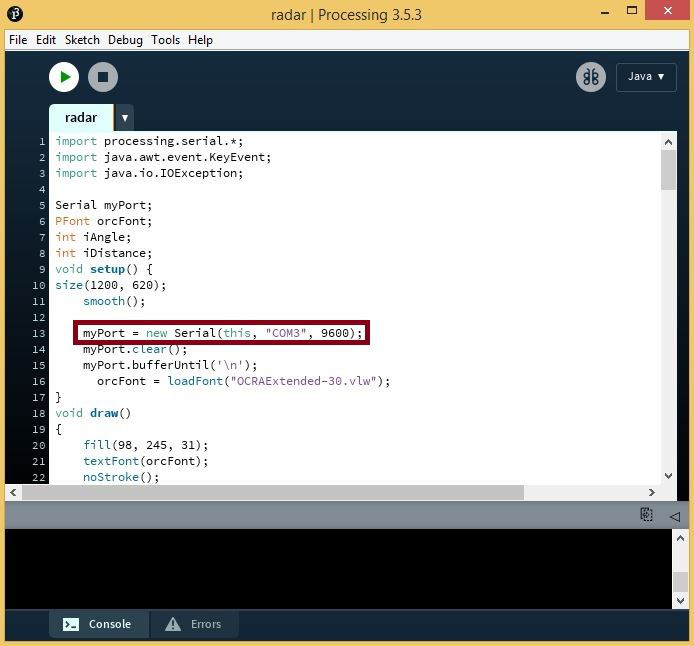
Nyt meidän on löydettävä COM-portin numero. Siirry Arduino IDE:hen ja etsi Com-portti (COM3 kuvassa). Aseta COM-portin numero käsittelykoodin riville 13 (COM3 kuvassa).
Vaihe 9:
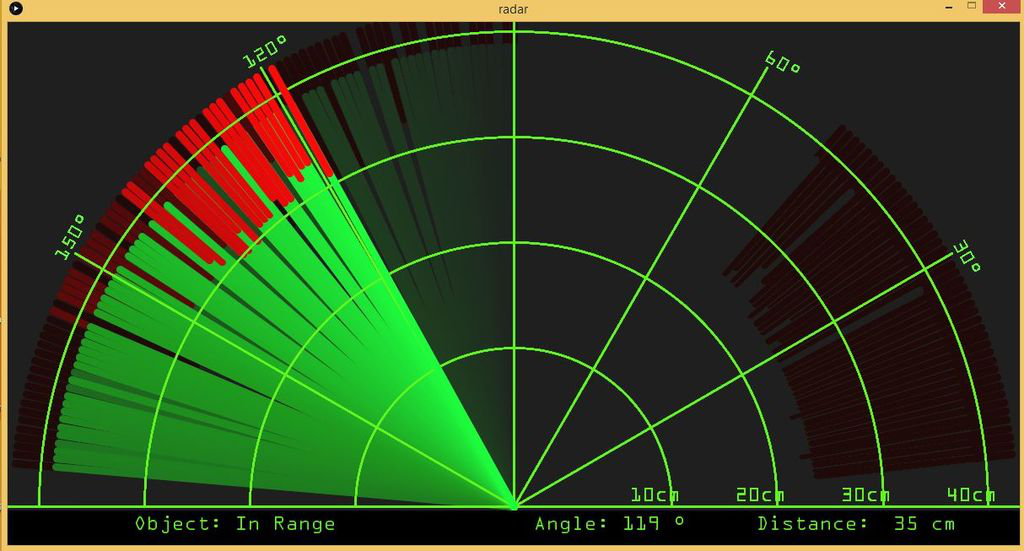
Lopuksi 'Suorita'-painikkeen painaminen avaa käsittelyikkunan. Se näyttää pietsosähköisen ultraäänianturianturin tutkan servokulman ja kohteen etäisyyden.






 Tech Co,.Ltd")