Language



























Pandangan: 17 Pengarang: Editor Tapak Masa Terbit: 2020-06-08 Asal: tapak








Komponen sensor ultrasonik yang perlu disenaraikan apabila menggunakan ultrasonik untuk membuat radar arduino.
Papan Arduino (saya menggunakan arduino Uno)
Motor servo (mg-996)
Penderia ultrasonik HC-SR04
Breadboard Jumper
Langkah 1:
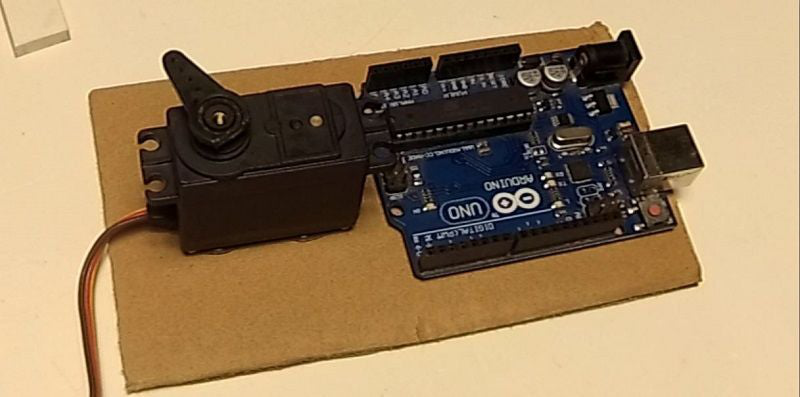
'Mula-mula, kita perlu memotong papan kad (15cm * 8cm). Kemudian, gamkan arduino dan motor servo pada transduser ultrasonik piezoelektrik
Langkah 2:
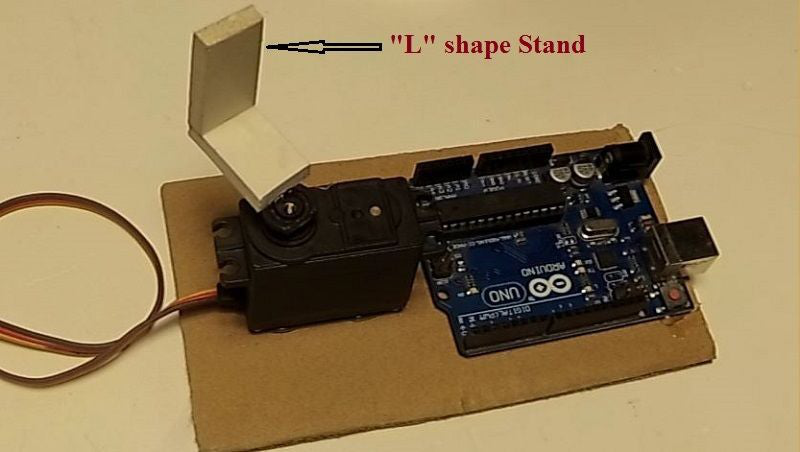
Sekarang, kita mesti membuat kurungan berbentuk 'L' untuk penderia ultrasonik (HC-SR04) untuk mengekalkannya pada motor servo.
Langkah 3:

Sekarang, kita mesti menyambungkan sensor sonar ke arduino. Berhati-hati apabila menyambungkan VCC dan GND sensor kepada 5v dan GND arduino, masing-masing. Selepas itu, sambungkan pin trig ke 8 dan pin gema ke 9 arduino.
Langkah 4:
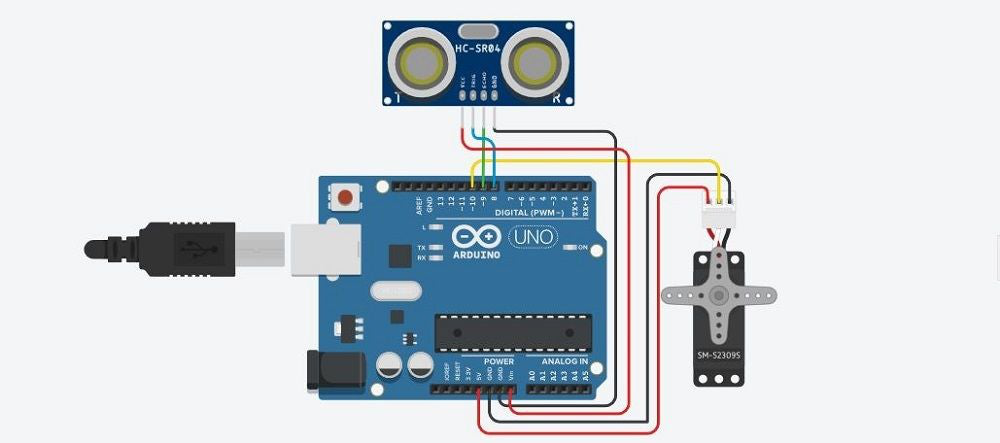
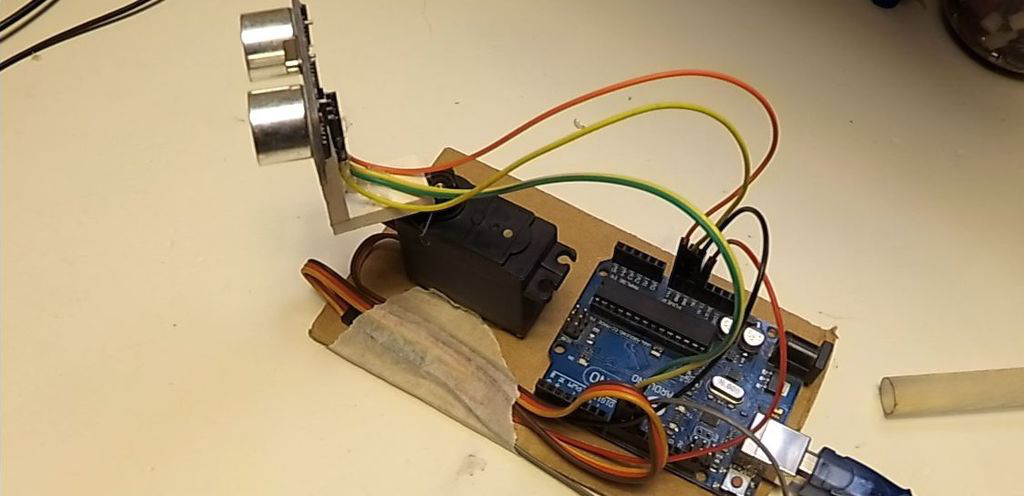
Selepas menyambungkan sensor transduser ultrasonik ke arduino, sudah tiba masanya untuk menyambungkan motor servo kepadanya. Sekali lagi, berhati-hati untuk menyambungkan VCC dan GND motor servo. Sambungkan isyarat servo ke pin 10 arduino.
Langkah 5: Perisian yang diperlukan untuk radar Arduino:
Anda memerlukan arduino IDE dan Processing IDE untuk menjalankan projek radarnya.
Memproses IDE akan mendapat nilai yang dihantar dari arduino dan menerangkan kawasan sasaran (tanda merah). Ikuti pautan untuk memuat turunnya.
Memproses IDE: https://processing.org/download/support.html
Arduino IDE: https://www.arduino.cc/en/main/software
Langkah 6: Kod Arduino:
#includeconst int TriggerPin = 8;
const int EchoPin = 9;
const int motorSignalPin = 10;
const int startingAngle = 90;
const int minimumAngle = 6;
const int maximumAngle = 175;
const int rotationSpeed = 1;
motor servo;
persediaan kosong (kosong)
{pinMode(TriggerPin, OUTPUT);
pinMode (EchoPin, INPUT);
motor.attach (motorSignalPin);
Serial.begin (9600);
gelung kosong (kosong)
{static int motorAngle = startingAngle;
static int motorRotateAmount = rotationSpeed;
motor.tulis (motorAngle);
Kelewatan (10);
SerialOutput (motorAngle, CalculateDistance());
motorAngle + = motorRotateAmount;
(motorAngle '= minimumAngle || motorAngle' = maximumAngle) {motorRotateAmount = -motorRotateAmount;
int CalculateDistance (kosong)
{digitalWrite(TriggerPin, HIGH);
kelewatanMikrosaat (10);
digitalWrite (TriggerPin, LOW);
tempoh panjang = pulseIn (EchoPin, HIGH);
jarak apungan = tempoh * 0.017F;
kembali int (jarak);
batal SerialOutput (sudut int const, jarak int const)
String angleString = String(sudut);
String distanceString = String(jarak);
Serial.println(angleString + ',' + distanceString);
Langkah 7: Kendalikan IDE:
Kita boleh menggunakan IDE pemprosesan untuk mencari mana-mana objek dalam julat (40 cm) dengan mudah. Jika tiada IDE pada PC anda, sila muat turunnya. Sebelum menggunakan IDE ini, kita mesti mengkonfigurasi fon.
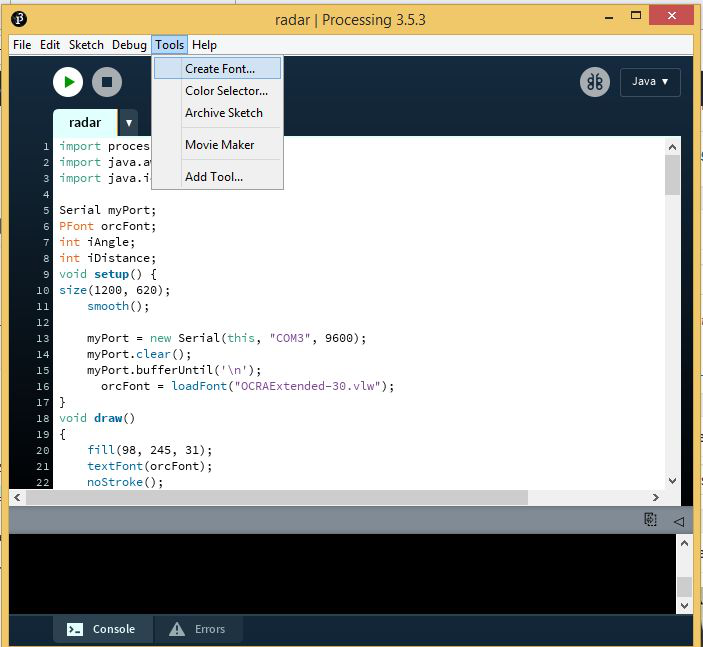
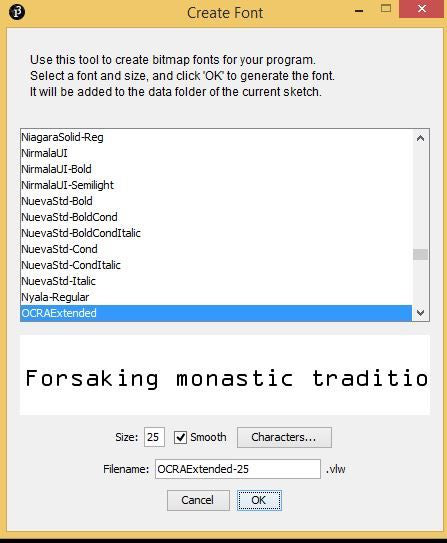
Untuk melakukan ini, kami mesti memasang fail 'OCRAEXT.TTF' yang terletak dalam Radar.zip. Kemudian, pergi ke alat/buat Font. Pilih 'OCRAExtended' daripada senarai, pilih saiz fon 25 dan klik 'OK'.
Langkah 8:
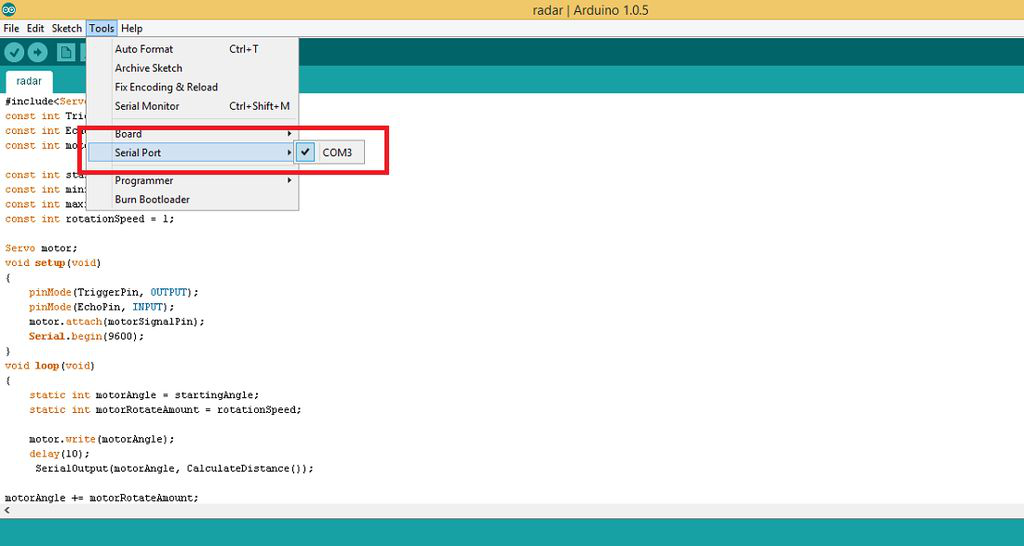
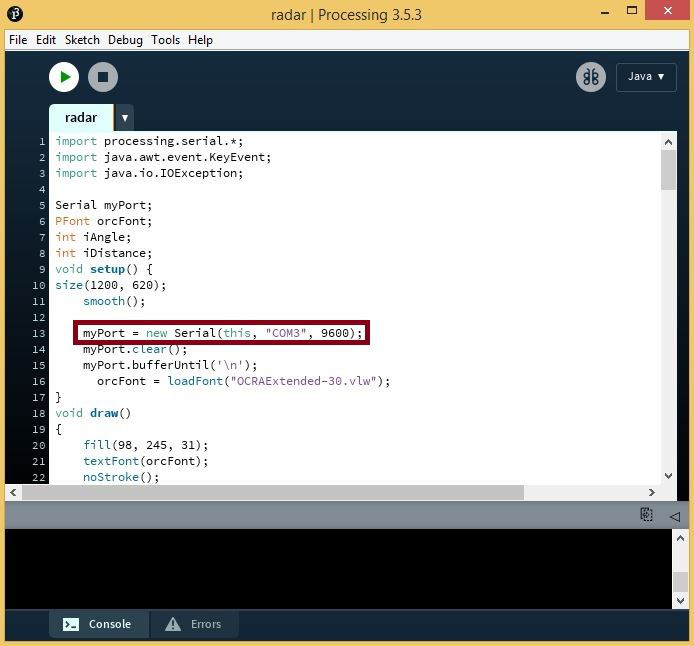
Sekarang, kita mesti mencari nombor port COM. Pergi ke Arduino IDE dan cari port Com (COM3 dalam foto). Letakkan nombor port COM pada baris 13 kod pemprosesan (COM3 dalam foto).
Langkah 9:
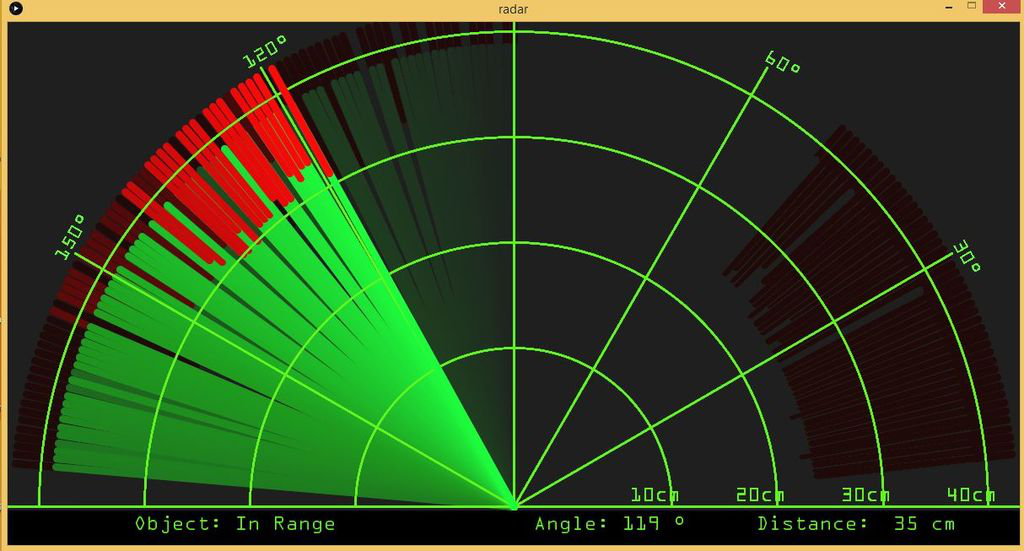
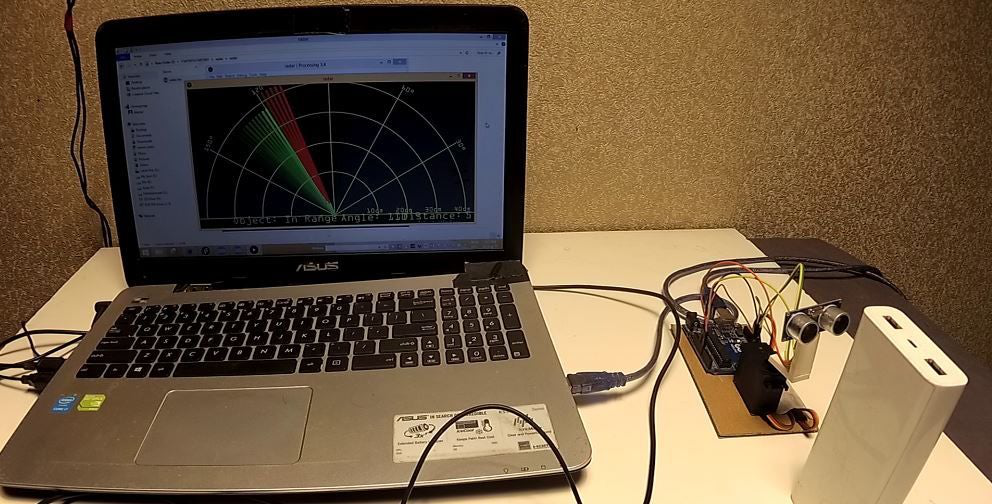
Akhir sekali, menekan butang 'Jalankan' akan memaparkan tetingkap pemprosesan. Ia akan menunjukkan sudut servo radar dan jarak objek penderia transduser ultrasonik piezoelektrik.






 Tech Co,.Ltd")