Hubei Hannas Tech Co.,Ltd-Professional Piezoceramic Elements Supplier
Hot Keywords:
- All
- Product Name
- Product Keyword
- Product Model
- Product Summary
- Product Description
- Multi Field Search

 |










| Quantity: | |
|---|---|
PHW-4M
Piezohannas
PHW-4M
4MHz Underwater Ultrasonic Transducer for 1M Depth Measurement

Technical parameters:
Items | Technical Parameters | Image | |
Name | 4MHz underwater ultrasonic transducer |
| |
Model | PHW-4M | ||
Frequency | 4MHz±5% | ||
Detecting distance | 0.01 ~ 1m | ||
Minimum Parallel lmpedance | 2.5Ω±20% | ||
3400pF±20% @1KHz | |||
Sensitivity | |||
Peak Voltage<75Vpp | |||
-40~+80℃ | |||
≤10Kilos or 1MPa | |||
| (Beamwidth)Half-power Beam Width@-3dB:1.2±10%, Sharp Angle:3.0±10% | ||
Housing Material | composite material | ||
Usage | Underwater distance measurement | ||
Install size | See product structure drawing for details | ||
Protection Level | IP68 | ||
Weight | 20.8g±5%(Length:1m) | ||
Wiring Instructions | Red: transducer +, white: transducer -, black: shielded wire; ( temperature sensor is optional) | ||
Admittance Curve | Product Structure Diagram | ||
|
| ||
Block diagram of ultrasonic transducer :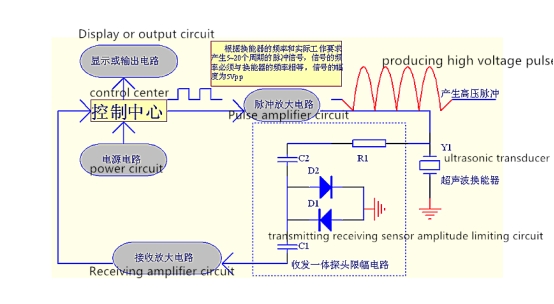
Schematic Diagram of Temperature Sensor (model: MF58_502F3470):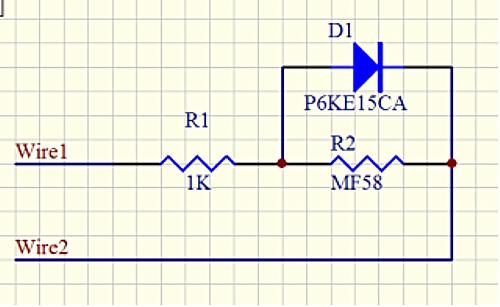
Integrated type Cable instruction:
1.Wiring instruction of transducer: interface (3pin, 2.54mm terminal)
Red: transducer +
White: transducer -
Black: shielding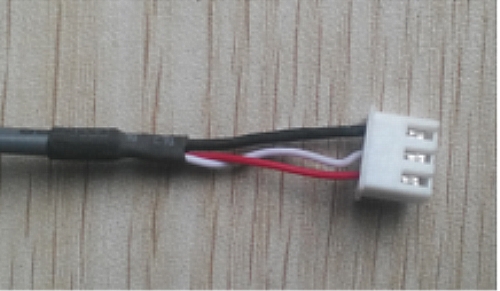
2.Cable Instruction of Temperature Sensor: interface (3pin, 2.0mm terminal)
Red and black are temperature sensor wiring
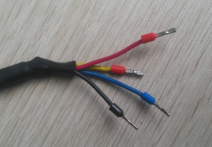
Split type: standard 10m cable, with each additional 50m of cable, the signal attenuation is 6dB
Three-core wiring instructions:
Red: Transducer +
Blue: temperature sensor +
Black: Public-
Four-core wiring instructions:
Red: Transducer +
Yellow: Transducer-
Blue, black: temperature sensor
Underwater distance measurement Application:
Ultrasonic detectors find the distance between the seabed and the surface of the water. To measure the level, depth, with an ultrasonic range detector, the module is mounted at the bottom of the sea, seabed, looking up the surface. We must measure the time between the transmit pulse and the echo received pulses. Since the ultrasonic signal is traveling at the speed of sound, the time between transmission and echo received is a measure of the distance to the surface, water depth. A micro-controller sends a pulse to the ultrasonic module. The module transmits an ultrasonic wave for a short period of time and waits to receive its echo. As soon as the echo is received at the ultrasonic module, a pulse is sent to the micro-controller, which measures the time between two pulses. There are two modes of operation, program mode and run mode. When the unit is powered, it is programmed to start up in the run mode, to detect the distance from the transducer face to a target depth in meters.













 Tech Co,.Ltd")





























