Language




























|










| Hoeveelheid: | |
|---|---|
PHW-4M
Piezohans
PHW-4M
4MHz onderwater ultrasoniese transducer vir 1M dieptemeting

Tegniese parameters:
Items |
Tegniese parameters |
Beeld |
|
Naam |
4MHz onderwater ultrasoniese transducer |
|
|
Model |
PH W- 4M |
||
Frekwensie |
4MHz± 5% |
||
Bespeur afstand |
0.01 ~ 1m |
||
Minimum Parallelle lmpedansie |
2.5Ω±20 % |
||
3400pF±20 % @1KHz |
|||
Sensitiwiteit |
|||
Piekspanning < 75Vpp |
|||
-40~ +80℃ |
|||
≤10 Kilo of 1MPa |
|||
|
(Baalwydte) Halfkragbalk Breedte @-3dB: 1.2± 10%, Skerp hoek: 3.0± 10% |
||
Behuisingsmateriaal |
saamgestelde materiaal |
||
Gebruik |
Onderwater afstandmeting |
||
Installeer grootte |
Sien produkstruktuurtekening vir besonderhede |
||
Beskermingsvlak |
IP68 |
||
Gewig |
20.8g±5 %( Lengte : 1m ) |
||
Bedradingsinstruksies |
Rooi: transducer +, wit: transducer -, swart: afgeskermde draad; (temperatuursensor is opsioneel ) |
||
Toelatingskurwe |
Produkstruktuurdiagram |
||
|
|
||
Blokdiagram van ultrasoniese transducer: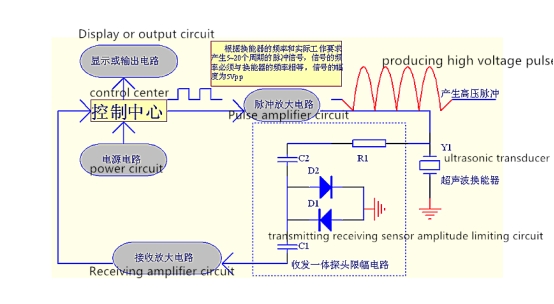
Skematiese diagram van temperatuursensor (model: MF58_502F3470) : 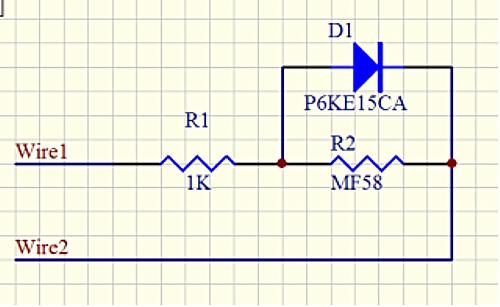
Geïntegreerde tipe kabelinstruksie:
1. Bedradingsinstruksie van transducer: koppelvlak (3pen, 2.54mm terminaal)
Rooi: transducer +
Wit: transducer -
Swart: afskerming 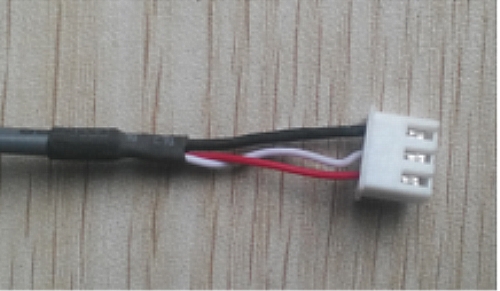
2.Kabelinstruksie van temperatuursensor: koppelvlak (3pin, 2.0mm terminaal) 
Rooi en swart is temperatuursensorbedrading
Gesplete tipe: standaard 10m kabel, met elke bykomende 50m kabel, is die seinverswakking 6dB
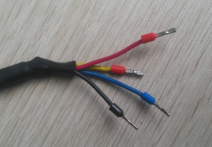
Driekernbedradingsinstruksies:
Rooi: Transducer +
Blou: temperatuursensor +
Swart: Publiek- 
Vierkernbedradingsinstruksies:
Rooi: Transducer +
Geel: Transducer-
Blou, swart: temperatuursensor
Onderwater afstandmeting Toepassing:
Ultrasoniese detektors vind die afstand tussen die seebodem en die oppervlak van die water. Om die vlak, diepte, met 'n ultrasoniese reeks detektor te meet, word die module op die bodem van die see gemonteer, seebodem, terwyl u na die oppervlak kyk. Ons moet die tyd meet tussen die uitsaaipuls en die eggo ontvang pulse. Aangesien die ultrasoniese sein teen die spoed van klank beweeg, is die tyd tussen transmissie en eggo ontvang 'n maatstaf van die afstand na die oppervlak, waterdiepte. 'n Mikrobeheerder stuur 'n puls na die ultrasoniese module. Die module stuur 'n ultrasoniese golf vir 'n kort tydperk uit en wag om sy eggo te ontvang. Sodra die eggo by die ultrasoniese module ontvang word, word 'n puls na die mikrobeheerder gestuur, wat die tyd tussen twee pulse meet. Daar is twee werkmodusse, programmodus en hardloopmodus. Wanneer die eenheid aangedryf word, is dit geprogrammeer om in die hardloopmodus te begin, om die afstand vanaf die transducer-vlak na 'n teikendiepte in meter op te spoor.













 Tech Co,.Ltd")



