Language




























|










| Määrä: | |
|---|---|
PHW-4M
Piezohannas
PHW-4M
4MHz vedenalainen ultraäänianturi 1M syvyyden mittaamiseen

Tekniset parametrit:
Tuotteet |
Tekniset parametrit |
Kuva |
|
Nimi |
4MHz vedenalainen ultraäänianturi |
|
|
Malli |
PH W- 4M |
||
Taajuus |
4MHz ± 5 % |
||
Etäisyyden tunnistaminen |
0.01 ~ 1m |
||
Minimi Rinnakkais lmpedanssi |
2.5Ω±20 % |
||
3400pF±20 % @1KHz |
|||
Herkkyys |
|||
Huippujännite < 75Vpp |
|||
-40~ +80 ℃ |
|||
≤10 kiloa tai 1 MPa |
|||
|
(Säteenleveys) Puolitehoinen säde Leveys @-3dB: 1.2± 10 %, Terävä kulma: 3.0± 10 % |
||
Asunnon materiaali |
komposiittimateriaalia |
||
Käyttö |
Vedenalaisen etäisyyden mittaus |
||
Asennuksen koko |
Katso lisätietoja tuotteen rakennepiirroksesta |
||
Suojaustaso |
IP68 |
||
Paino |
20.8g±5 %( Pituus : 1m ) |
||
Johdotusohjeet |
Punainen: anturi +, valkoinen: anturi -, musta: suojattu lanka; (lämpötila-anturi on valinnainen ) |
||
Pääsykäyrä |
Tuotteen rakennekaavio |
||
|
|
||
Ultraäänianturin lohkokaavio: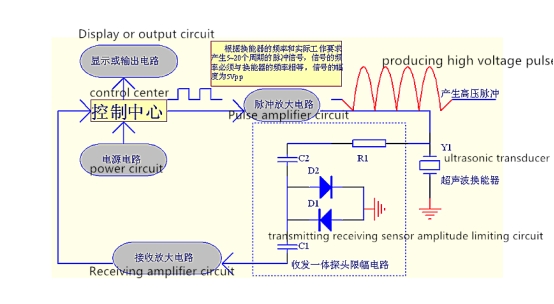
Lämpötila-anturin kaavio (malli: MF58_502F3470) : 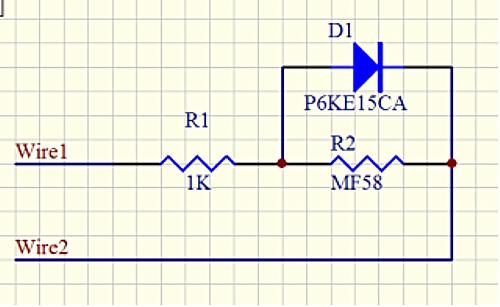
Integroitu tyyppi Kaapeliohje:
1.Anturin kytkentäohjeet: liitäntä (3pin, 2,54 mm liitin)
Punainen: anturi +
Valkoinen: anturi -
Musta: suojaus 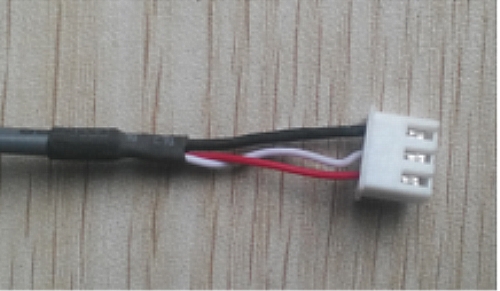
2. Kaapelin ohjeet Lämpötila-anturin liitäntä: liitäntä (3pin, 2,0 mm liitin) 
Punainen ja musta ovat lämpötila-anturin johtoja
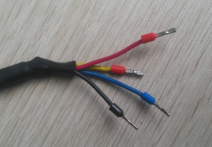
Jaettu tyyppi: tavallinen 10 m kaapeli, jokaisella lisäkaapelilla 50 m, signaalin vaimennus on 6 dB
Kolminapainen kytkentäohje:
Punainen: Anturi +
Sininen: Lämpötila-anturi +
Musta: Julkinen- 
Nelijohtiminen kytkentäohjeet:
Punainen: Anturi +
Keltainen: Anturi-
Sininen, musta: Lämpötila-anturi
Vedenalaisen etäisyyden mittaus Sovellus:
Ultraääniilmaisimet tunnistavat merenpohjan ja vedenpinnan välisen etäisyyden. Tason, syvyyden mittaamiseksi ultraäänietäisyystunnistimella moduuli asennetaan meren pohjaan, merenpohjaan, pintaa kohti. Meidän on mitattava aika lähetyspulssin ja kaiun vastaanotettujen pulssien välillä. Koska ultraäänisignaali kulkee äänen nopeudella, lähetyksen ja kaiun välinen aika on mitta etäisyydestä pintaan, veden syvyydestä. Mikro-ohjain lähettää pulssin ultraäänimoduuliin. Moduuli lähettää ultraääniaallon lyhyen aikaa ja odottaa saavansa sen kaiun. Heti kun kaiku vastaanotetaan ultraäänimoduulissa, mikro-ohjaimelle lähetetään pulssi, joka mittaa kahden pulssin välisen ajan. On olemassa kaksi toimintatilaa, ohjelmatila ja ajotila. Kun yksikkö on päällä, se on ohjelmoitu käynnistymään ajotilassa tunnistamaan etäisyys anturin pinnasta tavoitesyvyyteen metreinä.













 Tech Co,.Ltd")



