Language




























|










| Aantal: | |
|---|---|
PHW-4M
Piezohanna's
PHW-4M
4MHz ultrasone onderwatertransducer voor dieptemetingen van 1M

Technische parameters:
Artikelen |
Technische parameters |
Afbeelding |
|
Naam |
4MHz onderwatertransducer ultrasone |
|
|
Model |
PH W- 4M |
||
Frequentie |
4MHz± 5% |
||
Afstand detecteren |
0.01 ~ 1M |
||
Minimum Parallelle impedantie |
2.5Ω±20 % |
||
3400pF±20 % @1KHz |
|||
Gevoeligheid |
|||
Piekspanning < 75Vpp |
|||
-40~ +80℃ |
|||
≤10 kilo of 1 MPa |
|||
|
(Straalbreedte) Halfkrachtige straal Breedte @-3dB: 1.2± 10%, Scherpe hoek: 3.0± 10% |
||
Behuizingsmateriaal |
composiet materiaal |
||
Gebruik |
Onderwater afstandsmeting |
||
Grootte installeren |
Zie de productstructuurtekening voor details |
||
Beschermingsniveau |
IP68 |
||
Gewicht |
20.8g±5 % ( Lengte : 1m ) |
||
Bedradingsinstructies |
Rood: transducer +, wit: transducer -, zwart: afgeschermde draad; (temperatuursensor is optioneel ) |
||
Toegangscurve |
Productstructuurdiagram |
||
|
|
||
Blokschema van ultrasone transducer: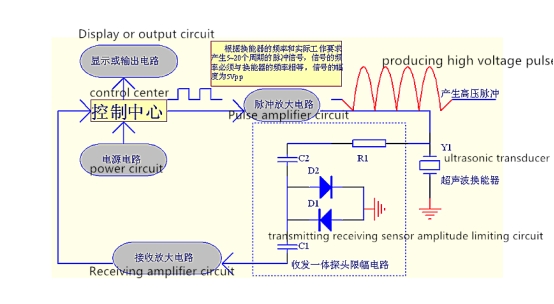
Schematisch diagram van temperatuursensor (model: MF58_502F3470) : 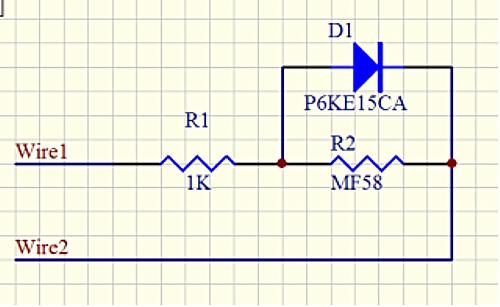
Geïntegreerd type Kabelinstructie:
1. Bedradingsinstructie van transducer: interface (3-pins, 2,54 mm-aansluiting)
Rood: transducer +
Wit: transducer -
Zwart: afscherming 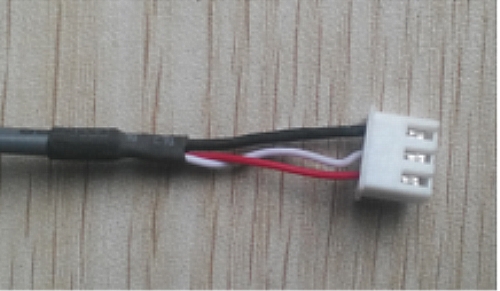
2. Kabelinstructie van temperatuursensor: interface (3-pins, 2,0 mm-aansluiting) 
Rood en zwart zijn bedrading van de temperatuursensor
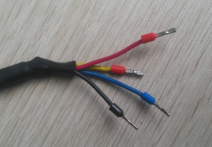
Gesplitst type: standaard kabel van 10 m, met elke extra 50 m kabel is de signaalverzwakking 6 dB.
Drieaderige bedradingsinstructies:
Rood: transducer +
blauw: temperatuursensor +
Zwart: openbaar 
- Vieraderige bedradingsinstructies:
Rood: transducer +
geel: transducer -
blauw, zwart: temperatuursensor
Onderwater afstandsmeting Toepassing:
Ultrasone detectoren bepalen de afstand tussen de zeebodem en het wateroppervlak. Om het niveau en de diepte te meten met een ultrasone afstandsdetector, wordt de module op de bodem van de zee, de zeebodem, gemonteerd, omhoog kijkend naar het oppervlak. We moeten de tijd meten tussen de zendpuls en de echo-ontvangstpulsen. Omdat het ultrasone signaal zich voortbeweegt met de snelheid van het geluid, is de tijd tussen verzending en ontvangen echo een maatstaf voor de afstand tot het oppervlak, de waterdiepte. Een microcontroller stuurt een puls naar de ultrasone module. De module zendt gedurende een korte tijd een ultrasone golf uit en wacht op de echo ervan. Zodra de echo op de ultrasoonmodule wordt ontvangen, wordt er een puls naar de microcontroller gestuurd, die de tijd tussen twee pulsen meet. Er zijn twee werkingsmodi: de programmamodus en de runmodus. Wanneer het apparaat wordt ingeschakeld, is het geprogrammeerd om op te starten in de run-modus, om de afstand van het transduceroppervlak tot een doeldiepte in meters te detecteren.













 Tech Co,.Ltd")



