Language




























|










| Kvantitet: | |
|---|---|
PHW-4M
Piezohannas
PHW-4M
4MHz undervattens ultraljudsgivare för 1M djupmätning

Tekniska parametrar:
Föremål |
Tekniska parametrar |
Bild |
|
Namn |
4MHz undervattens ultraljudsgivare |
|
|
Modell |
PH W- 4M |
||
Frekvens |
4MHz± 5 % |
||
Detekterar avstånd |
0.01 ~ 1m |
||
Minimum Parallell lmpedans |
2.5Ω±20 % |
||
3400pF±20 % @1KHz |
|||
Känslighet |
|||
Toppspänning < 75Vpp |
|||
-40~ +80℃ |
|||
≤10 kilo eller 1MPa |
|||
|
(Strålbredd) Halvkraftsstråle Bredd @-3dB: 1.2± 10 %, Skarp vinkel: 3.0± 10 % |
||
för hölje Material |
kompositmaterial |
||
Användande |
Avståndsmätning under vatten |
||
Installationsstorlek |
Se produktstrukturritning för detaljer |
||
Skyddsnivå |
IP68 |
||
Vikt |
20.8g±5 %( Längd : 1m ) |
||
Kabelinstruktioner |
Röd: givare +, vit: givare -, svart: skärmad tråd; (temperatursensor är valfritt ) |
||
Admittanskurva |
Produktstrukturdiagram |
||
|
|
||
Blockschema för ultraljudsgivare: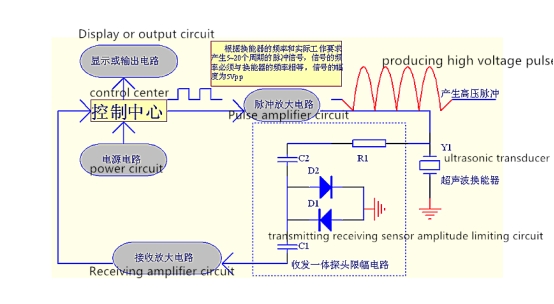
Schematiskt diagram av temperatursensor (modell: MF58_502F3470) : 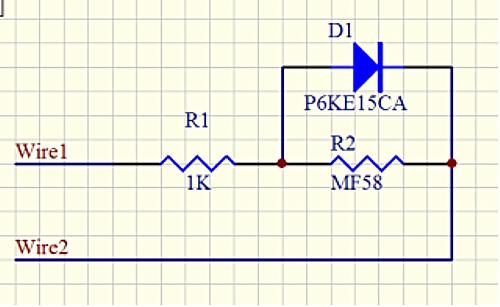
Inbyggd kabelinstruktion:
1. Kabelinstruktioner för givare: gränssnitt (3 stift, 2,54 mm anslutning)
Röd: givare +
Vit: givare -
Svart: skärmning 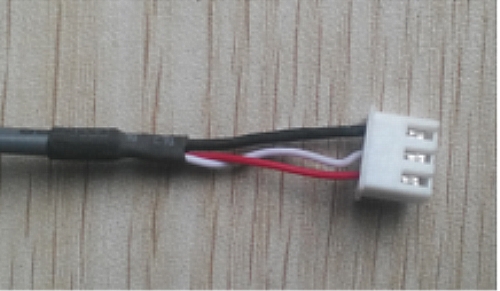
2. Kabelinstruktion för temperaturgivare: gränssnitt (3 stift, 2,0 mm anslutning) 
Röd och svart är ledningar för temperatursensorer
Delad typ: standard 10m kabel, med varje ytterligare 50m kabel, är signaldämpningen 6dB
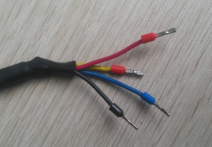
Tre-kärnig ledningsinstruktion:
Röd: Givare +
Blå: temperaturgivare +
Svart: Offentlig 
- Fyrkärnig kabelinstruktion:
Röd: Givare +
Gul: Givare
- Blå, svart: temperaturgivare
Undervattensavståndsmätning Applikation:
Ultraljudsdetektorer hittar avståndet mellan havsbotten och vattenytan. För att mäta nivån, djupet, med en ultraljudsavståndsdetektor, monteras modulen på botten av havet, havsbotten, tittar uppåt ytan. Vi måste mäta tiden mellan sändningspulsen och ekot mottagna pulser. Eftersom ultraljudssignalen färdas med ljudets hastighet är tiden mellan sändning och mottaget eko ett mått på avståndet till ytan, vattendjupet. En mikrokontroller skickar en puls till ultraljudsmodulen. Modulen sänder en ultraljudsvåg under en kort tidsperiod och väntar på att ta emot dess eko. Så fort ekot tas emot vid ultraljudsmodulen skickas en puls till mikrokontrollern som mäter tiden mellan två pulser. Det finns två driftlägen, programläge och körläge. När enheten är påslagen är den programmerad att starta i körläge för att detektera avståndet från givarens yta till ett måldjup i meter.













 Tech Co,.Ltd")



