Language




























|










| Ilość: | |
|---|---|
PHW-4M
Piezohanny
PHW-4M
Podwodny przetwornik ultradźwiękowy 4 MHz do pomiaru głębokości 1 m

Parametry techniczne:
Rzeczy |
Parametry techniczne |
Obraz |
|
Nazwa |
4MHz Podwodny ultradźwiękowy przetwornik |
|
|
Model |
PH W- 4M |
||
Częstotliwość |
4MHz ± 5% |
||
Wykrywanie odległości |
0.01 ~ 1M |
||
Minimum Równoległa impedancja |
2.5Ω±20 % |
||
3400pF±20 % @1KHz |
|||
Wrażliwość |
|||
szczytowe Napięcie < 75Vpp |
|||
-40~ +80℃ |
|||
≤10 kilogramów lub 1 MPa |
|||
|
(Szerokość wiązki) Wiązka o połowie mocy Szerokość @-3dB: 1.2± 10%, Ostry kąt: 3.0± 10% |
||
obudowy Materiał |
materiał kompozytowy |
||
Stosowanie |
Podwodny pomiar odległości |
||
Zainstaluj rozmiar |
Aby uzyskać szczegółowe informacje, zobacz rysunek struktury produktu |
||
Poziom ochrony |
IP68 |
||
Waga |
20.8g±5 %( Długość : 1m ) |
||
Instrukcje okablowania |
Czerwony: przetwornik +, biały: przetwornik -, czarny: przewód ekranowany; (czujnik temperatury jest opcjonalny ) |
||
Krzywa wstępu |
Schemat struktury produktu |
||
|
|
||
Schemat blokowy przetwornika ultradźwiękowego: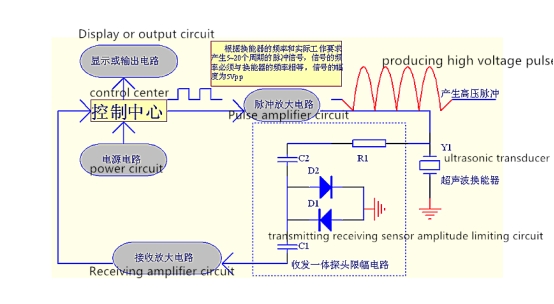
Schemat ideowy czujnika temperatury (model: MF58_502F3470) : 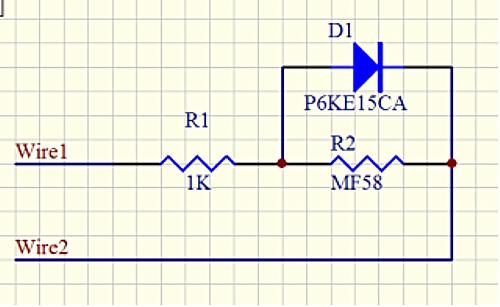
Typ zintegrowany Instrukcja kabla:
1.Instrukcja okablowania przetwornika: interfejs (3pin, zacisk 2,54mm)
Czerwony: przetwornik +
Biały: przetwornik -
Czarny: ekranowanie 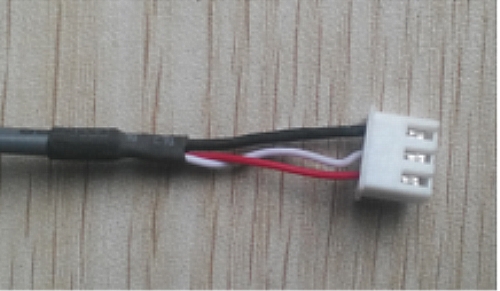
2.Instrukcja dotycząca kabla czujnika temperatury: interfejs (3pin, zacisk 2,0mm) 
Czerwony i czarny to okablowanie czujnika temperatury
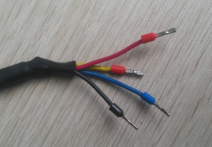
Typ rozdzielony: standardowy kabel o długości 10 m, każde dodatkowe 50 m kabla tłumienie sygnału wynosi 6 dB.
Instrukcje okablowania trójżyłowego:
Czerwony: przetwornik +
niebieski: czujnik temperatury +
Czarny: Publiczny - 
Instrukcje okablowania czterożyłowego:
Czerwony: przetwornik +
Żółty: przetwornik -
Niebieski, czarny: czujnik temperatury
Podwodny pomiar odległości Zastosowanie:
Detektory ultradźwiękowe wykrywają odległość między dnem morskim a powierzchnią wody. Aby zmierzyć poziom, głębokość za pomocą ultradźwiękowego detektora zasięgu, moduł montowany jest na dnie morza, dna morskiego, patrząc w górę powierzchni. Musimy zmierzyć czas między impulsem nadawczym a impulsami odebranymi przez echo. Ponieważ sygnał ultradźwiękowy przemieszcza się z prędkością dźwięku, czas między transmisją a otrzymaniem echa jest miarą odległości do powierzchni, czyli głębokości wody. Mikrokontroler wysyła impuls do modułu ultradźwiękowego. Moduł transmituje falę ultradźwiękową przez krótki czas i czeka na odebranie jej echa. Gdy tylko echo zostanie odebrane przez moduł ultradźwiękowy, impuls zostaje wysłany do mikrokontrolera, który mierzy czas pomiędzy dwoma impulsami. Istnieją dwa tryby pracy, tryb programu i tryb pracy. Gdy urządzenie jest zasilane, zaprogramowano je tak, aby uruchamiało się w trybie pracy w celu wykrycia odległości od czoła przetwornika do docelowej głębokości w metrach.













 Tech Co,.Ltd")



