Language




























|










| Antall: | |
|---|---|
PHW-4M
Piezohannas
PHW-4M
4MHz undervanns ultralydsvinger for 1M dybdemåling

Tekniske parametere:
Varer |
Tekniske parametere |
Bilde |
|
Navn |
4MHz undervanns ultralydsvinger |
|
|
Modell |
PH W- 4M |
||
Hyppighet |
4MHz± 5 % |
||
Registrerer avstand |
0.01 ~ 1m |
||
Minimum Parallell lmpedans |
2.5Ω±20 % |
||
3400pF±20 % @1KHz |
|||
Følsomhet |
|||
Toppspenning < 75Vpp |
|||
-40~ +80℃ |
|||
≤10 kilo eller 1 MPa |
|||
|
(Bjælkebredde) Halvkraftsstråle Bredde @-3dB: 1.2± 10 %, Skarp vinkel: 3.0± 10 % |
||
Husmateriale |
komposittmateriale |
||
Bruk |
Avstandsmåling under vann |
||
Installasjonsstørrelse |
Se produktstrukturtegning for detaljer |
||
Beskyttelsesnivå |
IP68 |
||
Vekt |
20.8g±5 %( Lengde : 1m ) |
||
Kablingsinstruksjoner |
Rød: svinger +, hvit: svinger -, svart: skjermet ledning; (temperatursensor er valgfritt ) |
||
Admittansekurve |
Produktstrukturdiagram |
||
|
|
||
Blokkdiagram av ultralydsvinger: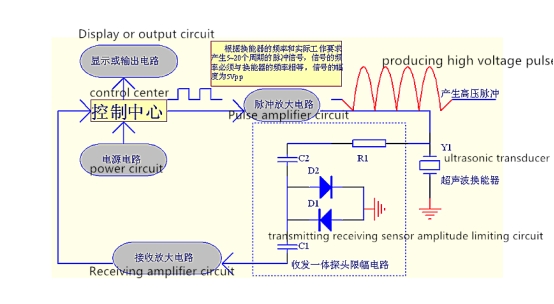
Skjematisk diagram av temperatursensor (modell: MF58_502F3470) : 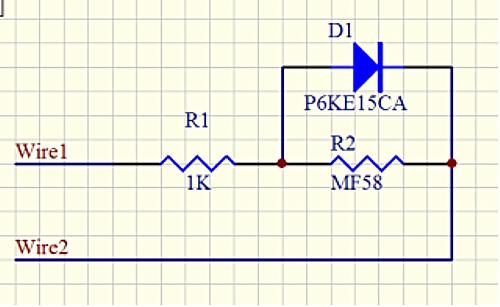
Integrert type Kabelinstruksjon:
1. Kablingsinstruksjon for transduser: grensesnitt (3pinners, 2,54 mm terminal)
Rød: transduser +
Hvit: transduser -
Sort: skjerming 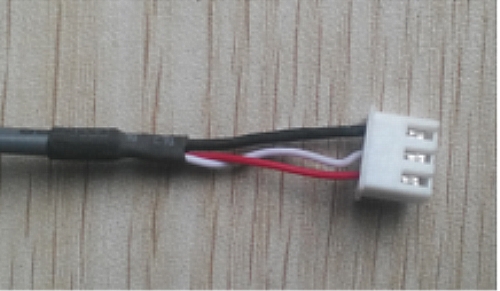
2. Kabelinstruksjon for temperatursensor: grensesnitt (3pin, 2,0 mm terminal) 
Rød og svart er temperatursensorledninger
Delt type: standard 10m kabel, med hver ekstra 50m kabel, er signaldempingen 6dB
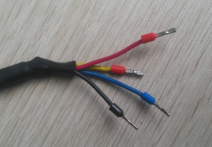
Tre-kjerners ledningsinstruksjoner:
Rød: Svinger +
Blå: temperatursensor +
Sort: Offentlig- 
Fire-kjerners ledningsinstruksjoner:
Rød: Svinger +
Gul: Svinger-
Blå, svart: temperatursensor
Avstandsmåling under vann Bruk:
Ultralyddetektorer finner avstanden mellom havbunnen og vannoverflaten. For å måle nivået, dybden, med en ultralydavstandsdetektor, er modulen montert på bunnen av havet, havbunnen, ser oppover overflaten. Vi må måle tiden mellom sendepulsen og ekkomottatte pulser. Siden ultralydsignalet beveger seg med lydens hastighet, er tiden mellom sending og ekko mottatt et mål på avstanden til overflaten, vanndybden. En mikrokontroller sender en puls til ultralydmodulen. Modulen sender en ultralydbølge i en kort periode og venter på å motta ekkoet. Så snart ekkoet mottas ved ultralydmodulen, sendes en puls til mikrokontrolleren, som måler tiden mellom to pulser. Det er to driftsmoduser, programmodus og kjøremodus. Når enheten er slått på, er den programmert til å starte opp i kjøremodus, for å oppdage avstanden fra transduserflaten til en måldybde i meter.













 Tech Co,.Ltd")



