Language




























|










| Mængde: | |
|---|---|
PHW-4M
Piezohans
PHW-4M
4MHz undervands ultralydstransducer til 1M dybdemåling

Tekniske parametre:
genstande |
Tekniske parametre |
Billede |
|
Navn |
4MHz undervands ultralydstransducer |
|
|
Model |
PH W- 4M |
||
Frekvens |
4MHz± 5 % |
||
Registrerer afstand |
0.01 ~ 1m |
||
Minimum Parallel lmpedans |
2.5Ω±20 % |
||
3400pF±20 % @1KHz |
|||
Følsomhed |
|||
Peak Voltage < 75Vpp |
|||
-40~ +80℃ |
|||
≤10 kilo eller 1MPa |
|||
|
(Bjælkebredde)Halv-power Beam Bredde @-3dB: 1.2± 10 %, Skarp vinkel: 3.0± 10 % |
||
til hus Materiale |
kompositmateriale |
||
Brug |
Undervandsafstandsmåling |
||
Installationsstørrelse |
Se produktstrukturtegning for detaljer |
||
Beskyttelsesniveau |
IP68 |
||
Vægt |
20.8g±5 %( Længde : 1m ) |
||
Ledningsinstruktioner |
Rød: transduc ~!phoenix_var219_1!~~!phoenix_var219_2!~ |
||
Admissionskurve |
Produktstrukturdiagram |
||
|
|
||
Blokdiagram af ultralydstransducer: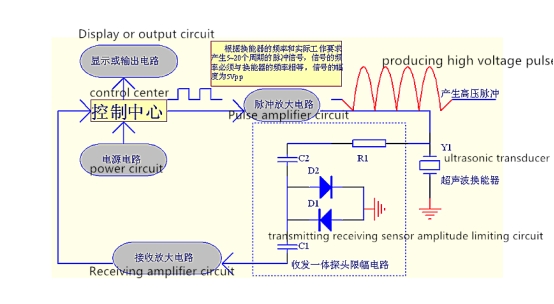
Skematisk diagram af temperatursensor (model: MF58_502F3470) : 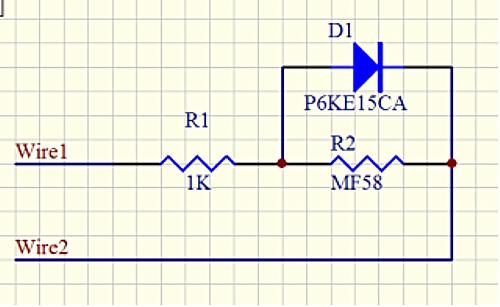
Integreret type Kabelinstruktion:
1. Ledningsinstruktion for transducer: interface (3-pin, 2,54 mm terminal)
Rød: transducer +
Hvid: transducer -
Sort: afskærmning 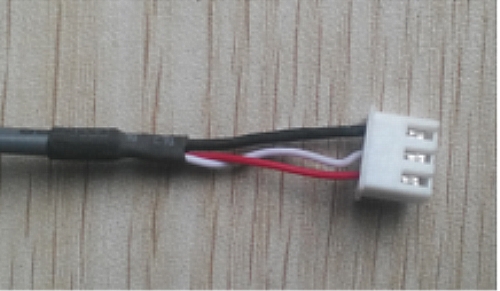
2. Kabelinstruktion af temperatursensor: interface (3-pin, 2,0 mm terminal) 
Rød og sort er temperatursensorledninger
Split type: standard 10m kabel, med hver yderligere 50m kabel, er signaldæmpningen 6dB
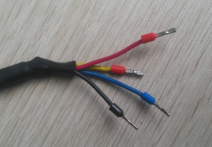
Tre-leder ledningsinstruktioner:
Rød: Transducer +
Blå: temperatursensor +
Sort: Offentlig- 
Fire-leder ledningsinstruktioner:
Rød: Transducer +
Gul: Transducer-
Blå, sort: temperatursensor
Undervandsafstandsmåling Anvendelse:
Ultralydsdetektorer finder afstanden mellem havbunden og vandoverfladen. For at måle niveauet, dybden, med en ultralydsafstandsdetektor, er modulet monteret på bunden af havet, havbunden, og kigger op ad overfladen. Vi skal måle tiden mellem sendeimpulsen og de modtagne ekkoimpulser. Da ultralydssignalet bevæger sig med lydens hastighed, er tiden mellem transmission og modtaget ekko et mål for afstanden til overfladen, vanddybden. En mikrocontroller sender en puls til ultralydsmodulet. Modulet sender en ultralydsbølge i en kort periode og venter på at modtage sit ekko. Så snart ekkoet modtages på ultralydsmodulet, sendes en puls til mikrocontrolleren, som måler tiden mellem to pulser. Der er to driftstilstande, programtilstand og driftstilstand. Når enheden er tændt, er den programmeret til at starte op i kørselstilstand for at registrere afstanden fra transducerens overflade til en måldybde i meter.













 Tech Co,.Ltd")



