Language



























Pandangan: 4 Pengarang: Editor Tapak Masa Terbit: 2020-06-05 Asal: tapak








Langkah 1: Sambungan perkakasan
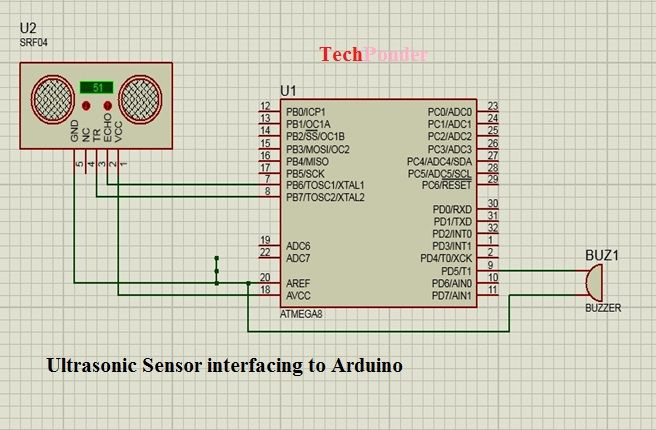

Sambungan perkakasan: -Transduser ultrasonik piezoelektrik rduino Penderia Ultrasonik 5v- 》 Vccgnd- 》 Gnd
Pin No. 8-Pin Trig
Pin 7-'Pin Gema
Buzzer Arduino
jahitan ke-9 -> jahitan +ve
Gnd- 》 -ve jarum
Langkah 2: Prosedur dan keputusan
Sensor ultrasonik dan antara muka Arduino.
int buzzer = 9;
int triggerPin = 7;//Pin pencetus 7
int echoPin = 8;//Echo pin 8
persediaan batal()
Serial.begin (9600); Kami akan memulakan komunikasi bersiri, supaya kami dapat melihat jarak pada monitor bersiri Serial.println (' Tutorial sensor pengukuran jarak ultrasonik Tech Ponder ').
pinMode (triggerPin, OUTPUT); //takrifkan pin
pinMode (echoPin, INPUT);
pinMode (buzzer, output);
digitalWrite (buzzer, LOW);}
gelung kosong()
{int duration, distance;//Tambah tempoh dan jarak
digitalWrite (triggerPin, HIGH);//cetus gelombang (contohnya untuk membuat LED berkelip)
kelewatan(10);
digitalWrite (triggerPin, LOW);
tempoh = pulseIn (echoPin, HIGH);//Fungsi khas untuk mendengar dan menunggu gelombang
jarak = (tempoh/2)/29.1;//Tukar nombor kepada cm (Jika anda mahu inci, anda mesti menukar 29.1 dengan nombor yang sesuai
kelewatan (1000);
Siri.cetak (jarak); mencetak nombor
Serial.print ('cm'); dan unit
Serial.println (''); hanya cetak ke baris baharu
jika (jarak '35'
digitalWrite (buzzer, HIGH);
Serial.println ('Buzzer Hidup');
digitalWrite (buzzer, RENDAH);
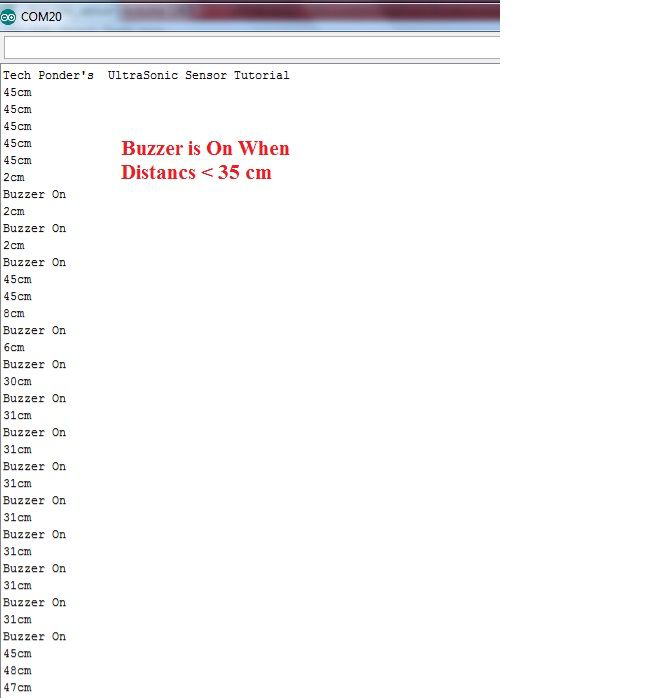
Hasilnya dipaparkan pada monitor bersiri.
Arduino menggunakan sensor jarak ultrasonik untuk mengira jarak setiap saat. Apabila jarak kurang daripada 35 cm, arduino akan mengesan ambang dan buzzer akan dihidupkan, yang boleh digunakan sebagai pengesan halangan. Apabila halangan lebih dekat daripada 35 cm, ia akan membunyikan penggera.





 Tech Co,.Ltd")