Language



































ステップ 1: ハードウェア 接続
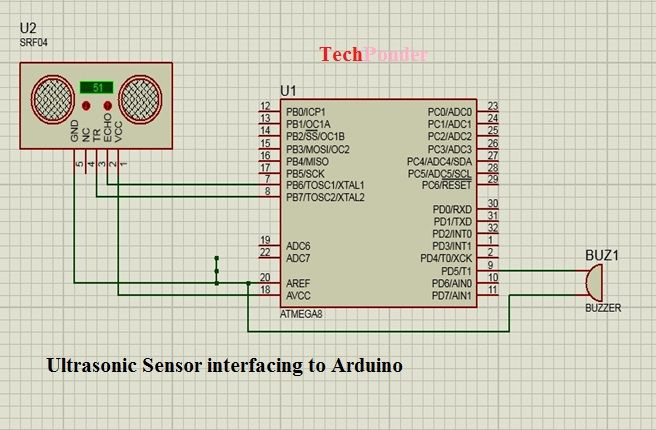

ハードウェア接続: -A rduino 圧電超音波トランスデューサ 超音波センサー 5v- 》 Vccgnd- 》 Gnd
ピン番号 8-Trig ピン
ピン 7-「エコー ピン」
Arduinoのブザー
9目→+5目
Gnd- 》 -ve 針
ステップ 2: 手順と 結果
超音波センサーとArduinoインターフェース。
int ブザー = 9;
inttriggerPin = 7;//トリガーピン7
int echoPin = 8;//エコーピン 8
void setup()
シリアル.begin (9600);シリアル通信を開始し、シリアル モニターで距離を確認できるようにします。 Serial.println ('Tech Ponder の 超音波距離測定センサーの チュートリアル')。
pinMode (トリガーピン、出力); //ピンを定義する
pinMode (echoPin、入力);
pinMode (ブザー、出力);
digitalWrite (ブザー、LOW);}
ボイドループ()
{intduration, distance;//継続時間と距離を追加します
digitalWrite (triggerPin, HIGH);//トリガー波(LEDを点滅させるためなど)
遅延(10);
デジタル書き込み (トリガーピン、LOW);
duration =pulseIn (echoPin, HIGH);//波を聞いて待つための特別な関数
distance = (duration/2)/29.1;//数値を cm に変換します (インチが必要な場合は、29.1 を適切な数値に変更する必要があります)
遅延 (1000);
Serial.print (距離);数字を印刷する
Serial.print ('cm');とユニット
Serial.println ('');新しい行にのみ出力します
if (距離「35」
デジタル書き込み (ブザー、HIGH);
Serial.println ('ブザーオン');
デジタル書き込み (ブザー、LOW);
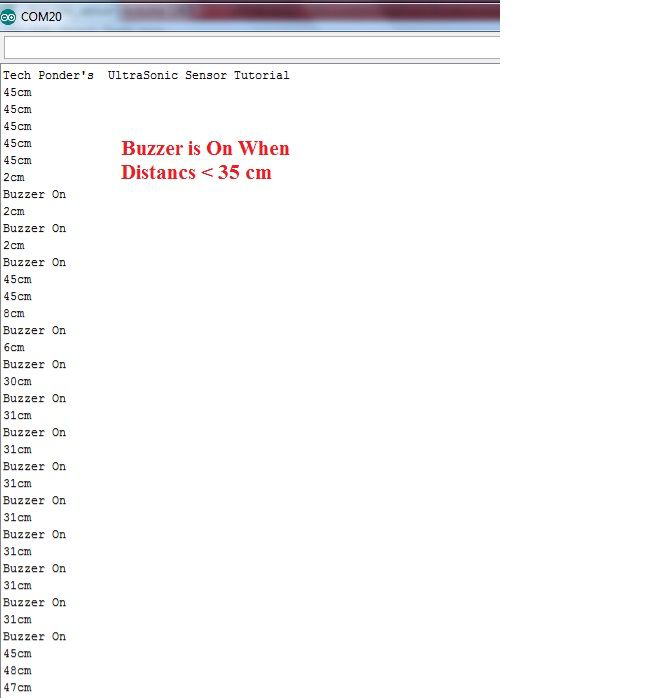
結果はシリアルモニターに表示されます。
Arduino は 超音波距離センサーを使用して、毎秒距離を計算します。距離が 35 cm 未満になると、Arduino がしきい値を検出し、ブザーがオンになり、障害物検知器として使用できます。障害物が35cmより近づくと警報が鳴ります。





 Tech Co,.Ltd")