Language



























Aantal keren bekeken: 1 Auteur: Site-editor Publicatietijd: 16-10-2020 Herkomst: Locatie








Vanwege de sterke gerichtheid van ultrasone golven, het trage energieverbruik en de lange afstanden in het medium, worden ultrasone golven vaak gebruikt voor afstandsmeting. Afstandsmeters en niveaumeetinstrumenten kunnen bijvoorbeeld worden gerealiseerd door ultrasone golven. Ultrasone detectie is vaak snel, handig, eenvoudig te berekenen, gemakkelijk real-time controle te realiseren en kan voldoen aan industriële praktische eisen op het gebied van meetnauwkeurigheid. Daarom wordt het ook veel gebruikt bij de ontwikkeling van mobiele robots. Dit artikel introduceert voornamelijk de HC-SR04 ultrasone module-afstandsmeetsensor en gedetailleerde uitleg van de productietekeningen. Ten eerste introduceert het het principe en de kenmerken van ultrasoon bereik. Ten tweede wordt de ultrasone afstandsmodule HC-SR04 uitgelegd. Ten slotte introduceert het de HC-SR04 ultrasone bereikmodulesensor.
principe en kenmerken van ultrasone afstandsmeting
Het principe van de ultrasone afstandssensor is het uitzenden van ultrasone golven vanuit de ultrasone zender. Het is gebaseerd op het tijdsverschil wanneer de ontvanger de ultrasone golven ontvangt en is vergelijkbaar met het principe van radarbereik. De ultrasone zender zendt ultrasone golven uit in een bepaalde richting en begint tegelijkertijd met de zendtijd te timen. De ultrasone golven planten zich voort in de lucht en keren onmiddellijk terug als ze onderweg obstakels tegenkomen. De ultrasone ontvanger stopt onmiddellijk na ontvangst van de gereflecteerde golven.
(De voortplantingssnelheid van ultrasone golven in de lucht bedraagt 340 m/s. Afhankelijk van de door de timer geregistreerde tijd t kan de afstand tussen het lanceerpunt en het(de) obstakel(s) worden berekend, namelijk: s=340t/2)
Functies
1. het is een hogere frequentie, het heeft een hogere nauwkeurigheid, maar de kleinere detectieafstand (luchtverzwakking neemt toe);
2, hoe hoger het uitgangsvermogen, hoe hoger de gevoeligheid, hoe langer de detectieafstand;
3. Meestal is de detectiehoek klein en het bereik iets verder;
Introductie van de HC-SR04 ultrasone bereikmodule
1, modulefuncties
De ultrasone bereikmodulesensor HC-SR04 heeft een nauwkeurige bereikafstand, die vergelijkbaar kan zijn met ultrasoon bereik van SRF05, SRF02, enz., met een meetafstand van 2 cm ~ 450 cm.
2, werkingsprincipe
1) Gebruik IO om het bereik te activeren en een hoog signaal van minimaal 10us te geven.
2) De module verzendt automatisch vierkante golven van 40 kHz en detecteert automatisch of er een signaalretour is.
3) Er is een signaalretour, een hoog niveau wordt uitgevoerd via IO, de duur van het hoge niveau is de tijd vanaf de ultrasone golf tot de terugkeer
3. Elektrische parameters

4. Ultrasone timinggrafiek
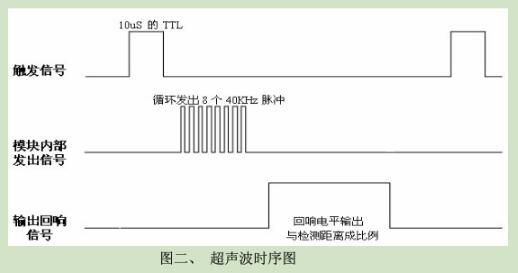
Het bovenstaande timingdiagram laat zien dat u alleen een pulstriggersignaal van meer dan 10 uS hoeft te leveren, en de arduino ultrasone afstandssensoren zullen cyclusniveaus van 40 kHz uitzenden en echo's detecteren. Zodra het echosignaal wordt gedetecteerd, wordt het echosignaal uitgevoerd. De pulsbreedte van het echosignaal is evenredig met de meetafstand. Daarom kan de afstand worden berekend uit het tijdsinterval tussen het verzonden signaal en het ontvangen echosignaal. Formule: us/58=cm of us/148=inch; of: afstand=tijd op hoog niveau*geluidssnelheid (340M/S)/2; de aanbevolen meetperiode is 60 ms of meer om de invloed van het verzonden signaal op het echosignaal te voorkomen.
Opmerking:
1. Deze module mag niet op elektriciteit worden aangesloten. Als u verbinding wilt maken met elektriciteit, sluit dan eerst de GND-aansluiting van de module aan, anders heeft dit invloed op de normale werking van de module.
2. Wanneer de afstand wordt gemeten, is het oppervlak van het gemeten object niet minder dan 05 vierkante meter en moet het vlak zo vlak mogelijk zijn, anders heeft dit invloed op het meetresultaat.
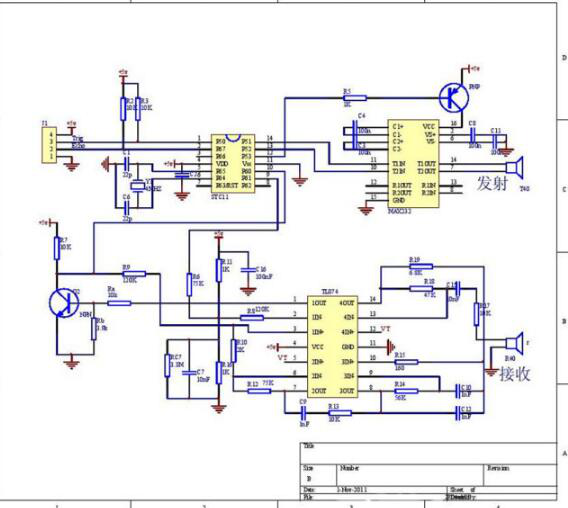
5, het interne schakelschema van de ultrasone vloeistofniveausensor





 Tech Co,.Ltd")