Hubei Hannas Tech Co.,Ltd-Professional Piezoceramic Elements Supplier
Hot Keywords:
- All
- Product Name
- Product Keyword
- Product Model
- Product Summary
- Product Description
- Multi Field Search

Views: 1 Author: Site Editor Publish Time: 2020-10-16 Origin: Site








Due to the strong directivity of ultrasonic waves, slow energy consumption, and long distances in the medium, ultrasonic waves are often used for distance measurement. For example, rangefinders and level measuring instruments can be realized by ultrasonic waves. Ultrasonic detection is often quick, convenient, simple to calculate, easy to achieve real-time control, and can meet industrial practical requirements in terms of measurement accuracy, so it has also been widely used in the development of mobile robots. This article mainly introduces the HC-SR04 ultrasonic module distance measuring sensor and detailed explanations of its production drawings. First, it introduces the principle and characteristics of ultrasonic ranging. Secondly, it explains the HC-SR04 ultrasonic ranging module. Finally, it introduces the HC-SR04 ultrasonic ranging module sensor.
principle and characteristics of ultrasonic distance measurement
The principle of ultrasonic ranging sensor is to emit ultrasonic waves from the ultrasonic transmitter. It is based on the time difference when the receiver receives the ultrasonic waves, it is similar to the principle of radar ranging. The ultrasonic transmitter emits ultrasonic waves in a certain direction, and starts timing at the same time as the transmitting time. The ultrasonic waves propagate in the air and return immediately when encountering obstacles on the way. The ultrasonic receiver stops timing immediately after receiving the reflected waves.
(The propagation speed of ultrasonic waves in the air is 340m/s. According to the time t recorded by the timer, the distance between the launching point and the obstacle (s) can be calculated, namely: s=340t/2)
Features
1. it is higher frequency, it has higher accuracy, but the closer detection distance (air attenuation increases);
2, the higher the output power, the higher the sensitivity, the longer the detection distance ;
3. Usually the detection angle is small, and the ranging range is slightly farther;
Introduction of HC-SR04 ultrasonic ranging module
1, module features
HC-SR04 ultrasonic ranging module sensor has accurate ranging distance, which can be comparable to ultrasonic ranging from SRF05, SRF02, etc., measuring distance 2cm~450cm.
2, working principle
1) Use IO to trigger the ranging and give a high level signal of at least 10us.
2) The module automatically sends 40KHz square waves, and automatically detects whether there is a signal return.
3) There is a signal return, a high level is output through IO, the duration of the high level is the time from the ultrasonic wave to the return
3. Electrical parameters

4. Ultrasonic timing chart
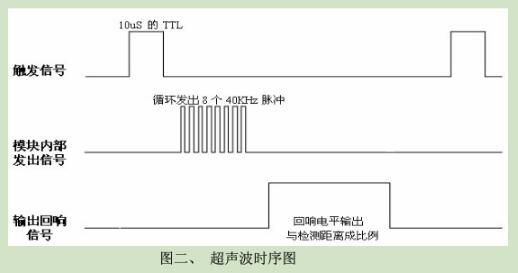
The above timing diagram shows that you only need to provide a pulse trigger signal above 10uS, and the arduino ultrasonic distance sensors will send out 40kHz cycle levels and detect echoes. Once the echo signal is detected, the echo signal is output. The pulse width of the echo signal is proportional to the measuring distance. Therefore, the distance can be calculated from the time interval between the transmitted signal and the received echo signal. Formula: uS/58=cm or uS/148=inch; or: distance=high level time*speed of sound (340M/S)/2; the recommended measurement period is 60ms or more to prevent the influence of the transmitted signal on the echo signal.
Note:
1. This module should not be connected with electricity. If you want to connect with electricity, please connect the GND terminal of the module first, otherwise it will affect the normal operation of the module.
2. When it is measuring the distance, the area of the measured object is not less than 05 square meters and the plane should be as flat as possible, otherwise it will affect the measurement result.
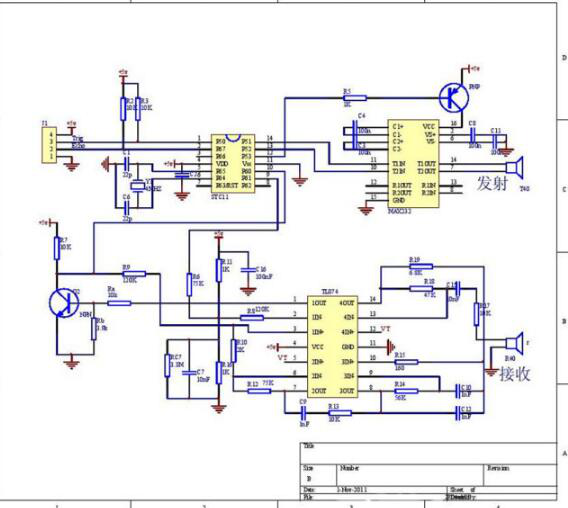
5, the internal circuit diagram of the ultrasonic liquid level sensor





 Tech Co,.Ltd")

























