Language



































超音波は指向性が強く、エネルギー消費が遅く、媒質中での距離が長いため、距離測定によく使用されます。例えば、距離計やレベル測定器は超音波によって実現できます。超音波検出は多くの場合、迅速で便利で、計算が簡単で、リアルタイム制御の実現が容易で、測定精度の点で産業上の実際の要件を満たすことができるため、移動ロボットの開発にも広く使用されています。この記事では主に超音波モジュール測距センサーHC-SR04の紹介とその製作図の詳細な説明を行います。まず、超音波測距の原理と特徴を紹介します。次に、超音波測距モジュール HC-SR04 について説明します。最後に、HC-SR04 超音波測距モジュール センサーを紹介します。
超音波距離測定の原理と特徴
超音波測距センサーの原理は、超音波発信器から超音波を発信することです。これは、受信機が超音波を受信するときの時間差に基づいており、レーダー測距の原理に似ています。超音波発信機は一定方向に超音波を発信し、発信時刻と同時に計時を開始します。超音波は空中を伝播し、途中で障害物に遭遇するとすぐに戻ってきます。超音波受信機は反射波を受信するとすぐに計時を停止します。
(空気中の超音波の伝播速度は 340m/s です。タイマーで記録された時間 t に基づいて、発射点と障害物との間の距離 (s) を計算できます。つまり、s=340t/2)
特徴
1. 周波数が高く、精度が高くなりますが、検出距離が近くなります (空気減衰が増加します)。
2、出力電力が高いほど、感度が高く、検出距離が長くなります。
3. 通常、検出角度は小さく、測距範囲はわずかに遠くなります。
超音波測距モジュール HC-SR04 の紹介
1、モジュールの機能
HC-SR04超音波測距モジュールセンサーは、SRF05、SRF02などの超音波測距に匹敵する正確な測距距離を備えており、測定距離は2cm〜450cmです。
2、動作原理
1) IO を使用して測距をトリガーし、少なくとも 10us の高レベル信号を与えます。
2) モジュールは 40KHz の方形波を自動的に送信し、信号の戻りがあるかどうかを自動的に検出します。
3) 信号の戻りがあり、IO を通じてハイレベルが出力されます。ハイレベルの持続時間は超音波が戻ってくるまでの時間です。
3. 電気的パラメータ

4. 超音波タイミングチャート
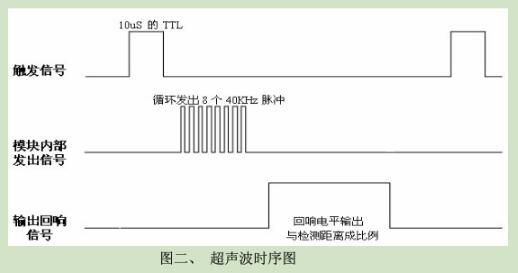
上のタイミング図は、10uSを超えるパルストリガー信号を提供するだけで済み、Arduinoの超音波距離センサーが40kHzのサイクルレベルを送信し、エコーを検出することを示しています。エコー信号が検出されると、エコー信号が出力されます。エコー信号のパルス幅は測定距離に比例します。したがって、送信信号と受信エコー信号の間の時間間隔から距離を計算できます。計算式: uS/58=cm または uS/148=インチ;または: 距離=高レベル時間*音速(340M/S)/2;送信信号によるエコー信号への影響を防ぐため、測定周期は60ms以上を推奨します。
注記:
1. このモジュールは電気に接続しないでください。電気に接続する場合は、最初にモジュールの GND 端子を接続してください。そうしないと、モジュールの通常の動作に影響します。
2. 距離を測定するとき、測定対象の面積は0.5平方メートル以上であり、平面はできるだけ平らである必要があります。そうしないと、測定結果に影響します。
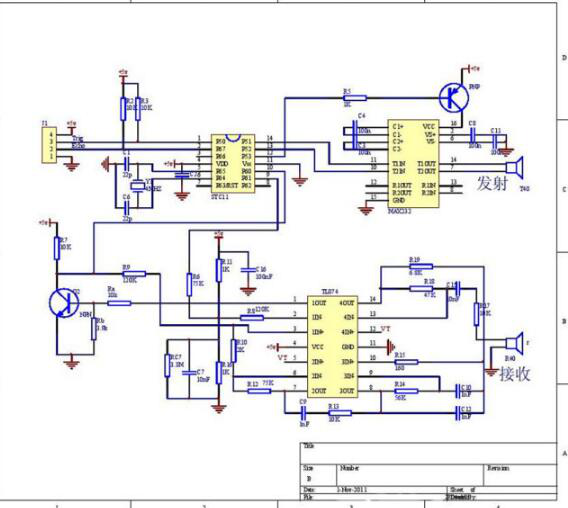
5、超音波液面センサーの内部回路図





 Tech Co,.Ltd")