Language



























Wyświetlenia: 0 Autor: Edytor witryny Czas publikacji: 30.09.2021 Pochodzenie: Strona








Streszczenie: Mając na celu rozwiązanie problemu ciśnienia strukturalnego hydrofonów wektorowych głębinowych, wyprowadza się wzór na maksymalne naprężenie kulistej powłoki ciśnienia zewnętrznego oraz wpływ materiałów i wymiarów współwibrującego hydrofon wektora sferycznego pod kątem jego właściwości akustycznych i parametrów ciśnieniowych. W tym miejscu analizowano Na tej podstawie podano metodę projektowania cienkościennej, odpornej na ciśnienie kulistej powłoki o minimalnej średniej gęstości. Badane są typowe materiały do inżynierii głębinowej, wybierany jest materiał ze stopu aluminium i produkowany jest hydrofon wektora sferycznego współwibracji o zaprojektowanej głębokości oporu ciśnieniowego wynoszącej 3000 m. Metodą elementów skończonych symulowano odporną na ciśnienie strukturę hydrofonu oraz testowano jego czułość, kierunkowość i odporność na ciśnienie. Wyniki pokazują, że hydrofon wektorowy ma dobrą kierunkowość cosinusową, czułość wynosi -188 dB przy 500 Hz i wytrzymuje ciśnienie zewnętrzne 37,5 MPa. Weryfikuje to metodę projektowania i inżynierię cienkościennej, odpornej na ciśnienie kulistej powłoki o minimalnej średniej gęstości, podanej w tym artykule. Racjonalność i wykonalność projektu prototypu
Wstęp
The Hydrofon wektorów współwibracji może mierzyć informacje o wektorze prędkości drgań w ośrodku pola dźwiękowego, a hydrofon z pojedynczym wektorem może zakończyć ustalanie kierunku celu akustycznego. Ma również zalety w postaci małych rozmiarów, niskiego zużycia energii, wysokiej czułości, umiarkowanego pasma częstotliwości i doskonale nadaje się do instalacji na podwodnych platformach bezzałogowych, takich jak podwodne szybowce i boje profilowe, do wykonywania zadań takich jak wykrywanie celów i monitorowanie hałasu w środowisku morskim. Obecnie wraz z rozwojem technologii odpornej na ciśnienie wzrasta głębokość robocza różnych podwodnych platform bezzałogowych, co stawia wyższe wymagania w zakresie wytrzymałości hydrofonów wektorowych na ciśnienie. Stany Zjednoczone, Rosja i inne kraje opracowały hydrofony wektorowe o głębokości roboczej 5000 ~ 6000 m. W kraju jest on wciąż w początkowej fazie badań. Hydrofon wektorowy o głębokości oporu ciśnieniowego 1000 m został wykonany przy użyciu żywicy epoksydowej i materiału kompozytowego zawierającego mikrokulki szklane oraz wypełnienia olejem z metalowej powłoki. Czułość i kierunkowość hydrofonu są niezadowalające; dwuwarstwowy schemat zewnętrznej powłoki kompozytowej i wewnętrznej powłoki ze stopu aluminium wykorzystano do zaprojektowania hydrofonu wektorowego o głębokości oporu ciśnieniowego 2000 m. Ze względu na duży rozmiar jego górna granica częstotliwości wynosi tylko 1000 Hz; Odporny na ciśnienie kompozytowy hydrofon wektorów wibracji został zaprojektowany i wyprodukowany z metalową obudową pokrytą powłoką poliuretanową. Test nurkowania, maksymalna głębokość nurkowania wynosi 1200 m. Konstrukcja cienkiej skorupy ze stopu aluminium w kształcie kapsułki realizuje hydrofon wektora wibracji o wytrzymałości na ciśnienie 20 MPa. W tym artykule odpowiednia teoria projektowania zbiorników ciśnieniowych została zastosowana do konstrukcji hydrofonu wektorowego o dużej głębokości, a jednowarstwowa cienkościenna sferyczna powłoka wykonana z materiałów metalowych o wysokiej wytrzymałości jest bezpośrednio stosowana jako odporna powłoka hydrofonu wektorowego. Proces według tego schematu jest stosunkowo prosty i może osiągnąć dużą głębokość napięcia wytrzymywanego. W tym schemacie kluczem do zaprojektowania ciśnieniowej sferycznej powłoki hydrofonu wektorowego jest wybór materiału powłoki sferycznej i zaprojektowanie jej rozmiaru w taki sposób, aby właściwości akustyczne hydrofonu wektorowego mogły zostać maksymalnie poprawione przy założeniu, że odporność na ciśnienie spełnia wymagania.
1 Czynniki wpływające na właściwości akustyczne współwibrującego hydrofonu wektorowego sferycznego
Kiedy współwibruje Hydrofon wektorowy o niskiej częstotliwości działa w podwodnym polu dźwiękowym, będzie wibrował pod wpływem pola dźwiękowego. Ustaw jego prędkość drgań na v. Dodatkowo ustaw położenie oryginalnego środka geometrycznego hydrofonu, gdy hydrofon nie jest umieszczony w polu dźwiękowym. Jeżeli prędkość drgań cząstki ośrodka wynosi v0, to warunek zależności (3) można wyrazić jako częstotliwość fali dźwiękowej fc 2 π R. Z równania (3) wynika, że gdy górna granica częstotliwości roboczej współoscylującego hydrofonu wektora sferycznego jest znacznie mniejsza niż oc 2 π R, to im mniejsza jest średnia gęstość hydrofonu, tym mniejsza jest amplituda prędkości drgań v i wibracja punktu jakości wody w polu dźwiękowym. Im większa jest wartość bezwzględna stosunku amplitudy prędkości, tym większa jest czułość prędkości drgań hydrofonu, a różnica fazowa pomiędzy prędkością drgań hydrofonu a prędkością drgań punktu jakości wody zbliża się do zera. Ponieważ hydrofon wektorów współwibracji jest również wyposażony w czujniki wychwytujące drgania, obwody kondycjonowania sygnału i inne dodatkowe struktury, trudno jest zdać sobie sprawę, że średnia gęstość vr hydrofonu wektorowego jest mniejsza niż gęstość ρ 0 wody. Inżynieria generalnie dąży do tego, aby średnia gęstość hydrofonu była zbliżona do gęstości ośrodka wodnego. W tym czasie hydrofon może wychwycić prędkość drgań punktu jakości wody w polu dźwiękowym w przybliżeniu 1:1, a górną granicą częstotliwości roboczej hydrofonu może być woda o tym samym wektorze wibracji. Wydajność akustyczna słuchacza obejmuje głównie czułość, kierunkowość i pasmo częstotliwości roboczej. Gdy czułość czujnika drgań wewnętrznych jest stała, czułość hydrofonu jest określana na podstawie jego średniej gęstości. Im mniejsza jest średnia gęstość, tym wyższa jest czułość hydrofonu. Kierunkowość hydrofonu zależy głównie od czułości bocznej wewnętrznego czujnika drgań. Kształt hydrofonu również będzie miał wpływ na kierunkowość. Im bardziej hydrofon jest zbliżony do standardowego kształtu kulistego, tym mniej będzie miał zakłóceń w kierunkowości. Ponieważ górna granica częstotliwości czujnika wychwytującego drgania wewnętrzne jest zazwyczaj wysoka, górna granica pasma częstotliwości roboczej hydrofonu jest zazwyczaj wyznaczana przez zewnętrzny promień Ro hydrofonu. Im mniejszy promień zewnętrzny, tym wyższa górna granica częstotliwości roboczej hydrofonu. Dlatego przy projektowaniu odpornej na ciśnienie powłoki sferycznej hydrofonu wektora współwibracji, w celu maksymalizacji parametrów akustycznych hydrofonu, konieczne jest, aby średnia gęstość r powłoki sferycznej była jak najmniejsza, przy założeniu spełnienia wymagań dotyczących odporności na ciśnienie. Jednocześnie staraj się, aby promień zewnętrzny Ro był jak najmniejszy. Górna granica częstotliwości współwibrującego hydrofonu wektora sferycznego wymaga, im mniejszy promień zewnętrzny, tym lepiej; czułość współwibrującego hydrofonu wektora sferycznego wymaga, aby im mniejsza była średnia gęstość, tym lepiej; im mniejszy jest promień zewnętrzny, gdy materiał i grubość pozostają niezmienione, zamiast tego wzrasta średnia gęstość, co jest sprzecznością. Wydajność ciśnieniowa współwibrującego hydrofonu z wektorem sferycznym wymaga, im mniejszy promień zewnętrzny, tym większa grubość i im wyższa wytrzymałość materiału, tym lepiej. Im mniejszy promień zewnętrzny i im większa grubość, tym większa jest średnia gęstość, co również jest sprzecznością. Odporność na ciśnienie i właściwości akustyczne współwibrującego hydrofonu wektorowego sferycznego wymagają, aby konstrukcja jego kulistej powłoki była jak najmniejsza (wysoka czułość) i jak najmniejszy promień zewnętrzny (górna granica wysokiej częstotliwości) przy założeniu osiągnięcia wymagań dotyczących odporności na ciśnienie). Ograniczenia te wzajemnie się ograniczają. Poniżej zbadana zostanie zależność między materiałem, promieniem zewnętrznym i grubością sferycznej powłoki współwibrującego hydrofonu wektora sferycznego a jego odpornością na ciśnienie, czułością i górną granicą wysokiej częstotliwości, aby znaleźć wektor o najlepszych właściwościach akustycznych przy założeniu spełnienia wymagań dotyczących ciśnienia. Schemat konstrukcyjny odpornej na ciśnienie sferycznej powłoki hydrofonu.
2 Analiza zniszczenia cienkościennej sferycznej powłoki pod ciśnieniem zewnętrznym
Kiedy współwibrujący hydrofon sferyczny działa normalnie pod wodą, jego odporna na ciśnienie kulista powłoka jest poddawana działaniu zewnętrznego ciśnienia hydrostatycznego. Jest to zewnętrzny zbiornik ciśnieniowy. Bez uwzględnienia uszkodzeń korozyjnych istnieją dwa główne tryby uszkodzeń: uszkodzenie wytrzymałościowe i uszkodzenie stabilności.
2.1 Brak wytrzymałości
Uszkodzenie wytrzymałości oznacza, że gdy maksymalne naprężenie materiału w zbiorniku ciśnieniowym przekracza jego granicę plastyczności, materiał przechodzi od odkształcenia sprężystego do odkształcenia plastycznego, co powoduje nieodwracalne odkształcenie lub pęknięcie. Zgodnie z teorią maksymalnego naprężenia głównego i kryterium zniszczenia sprężystego, jeżeli kulista powłoka pod ciśnieniem zewnętrznym nie wykazuje uszkodzeń wytrzymałościowych, maksymalne naprężenie T powinno być mniejsze lub równe dopuszczalnemu naprężeniu niszczącemu wytrzymałościowo materiału użytego w skorupie kulistej. W dziedzinie projektowania zbiorników ciśnieniowych ludzie stosują wzór na maksymalne naprężenie przy projektowaniu sferycznych powłok pod ciśnieniem zewnętrznym. Ta formuła jest formułą podsumowującą doświadczenie inżynierskie. Obliczenia są proste, ale warunkiem ich ustalenia jest to, że powłoka sferyczna jest powłoką cienkościenną, czyli wymagany jest Ro/Ri. ≤ 1,35, gdzie Ro jest zewnętrznym promieniem sferycznej powłoki, a Ri jest promieniem wewnętrznym. Rozwiązanie otrzymane przy użyciu tego wzoru należy do lokalnego rozwiązania optymalnego. Dlatego ponownie wyznacza się maksymalne naprężenie sferycznej powłoki pod ciśnieniem zewnętrznym. Niech p będzie ciśnieniem zewnętrznym wywieranym na kulistą powłokę, a δ będzie grubością kulistej powłoki. Zgodnie z teorią wolnej od momentu obrotowej powłoki, naprężenie promieniowe wewnątrz cienkościennej kulistej powłoki pod ciśnieniem zewnętrznym jest bardzo małe i θθ . uwzględniane są jedynie osiowe naprężenia ściskające Tzz i obwodowe naprężenia ściskające T Ponieważ kształt geometryczny kulistej powłoki jest symetryczny względem środka kuli, osiowe naprężenie ściskające i obwodowe naprężenie ściskające mają jednakową wartość. Na odcinku przechodzącym przez środek kuli siła wypadkowa ciśnienia zewnętrznego p na przekroju powłoki kulistej wynosi Fs=p π Ro2, a pole przekroju poprzecznego materiału powłoki Ss= π (Ro2-Ri2), zatem Tzz i T θθ sferycznej powłoki pod ciśnieniem zewnętrznym są powłoką kulistą. Zniszczenie wytrzymałościowe musi spełniać maksymalne dopuszczalne ciśnienie zewnętrzne pi
2.2 Brak stabilności
Zaburzenie stabilności odnosi się do uszkodzenia naczynia ciśnieniowego ze stanu równowagi stabilnej do stanu niestabilnego pod działaniem obciążenia zewnętrznego i nagłej utraty pierwotnego kształtu geometrycznego. Gdy grubość kulistej powłoki jest bardzo mała, uszkodzenie niestabilności często występuje przed uszkodzeniem wytrzymałości. Dla cienkościennej sferycznej powłoki pod ciśnieniem zewnętrznym wzór obliczeniowy krytycznego ciśnienia wyboczeniowego pcr wyprowadza się z teorii małych odkształceń, gdzie E jest modułem Younga materiału powłoki kulistej i jest współczynnikiem Poissona materiału. Obliczenie wzoru na teoretyczne ciśnienie krytyczne małych odkształceń jest stosunkowo proste, ale błąd jest stosunkowo duży, co można skompensować większym współczynnikiem bezpieczeństwa m. GB 150,3 podaje m=14,52. Następnie musi być spełnione maksymalne dopuszczalne ciśnienie zewnętrzne ps powodujące utratę stabilności cienkościennej kulistej powłoki.
3 Projekt optymalizacyjny odpornej na ciśnienie sferycznej powłoki hydrofonu wektorowego
Odporna na ciśnienie kulista powłoka wektorowy przetwornik hydrofonowy nie ulega awarii i musi wytrzymać maksymalne dopuszczalne ciśnienie zewnętrzne p=min(pi, ps). Oprócz parametrów samego materiału, maksymalne dopuszczalne ciśnienie zewnętrzne p kulistej powłoki odnosi się jedynie do Ri/Ro. Zdefiniuj zmienną X=Ri/Ro. Łatwo wiedzieć, że X jest stosunkiem promienia wewnętrznego i zewnętrznego powłoki sferycznej, X∈(0,1), zmienna ta jest bezwymiarowa, im większe X, tym cieńsza powłoka sferyczna. Po dopuszczalnym naprężeniu T danego materiału i maksymalnym dopuszczalnym ciśnieniu zewnętrznym p kulistej powłoki, otrzymuje się maksymalną wartość X, przy której kulista powłoka spełnia wymagania wytrzymałościowe, co zapisuje się jako Xi. Podobnie moduł Younga E, po stosunku Poissona μ i maksymalnym dopuszczalnym ciśnieniu zewnętrznym p sferycznej powłoki, ze wzoru można otrzymać maksymalną wartość X, przy której kulista powłoka spełnia wymagania stabilności, co zapisuje się jako Xs. Współwibrujący hydrofon sferyczny może wytrzymać zewnętrzną wodę statyczną. Funkcja ciśnienia p bez uszkodzenia, a odporna na ciśnienie skorupa sferyczna musi spełniać jednocześnie warunki braku uszkodzenia wytrzymałościowego i stabilności, a maksymalna wartość X spełniająca jednocześnie wymagania wynosi X = min X, X (12) Xmax jest wyznaczana Później można dalej uzyskać minimalną średnią gęstość powłoki kulistej. Łatwo wiedzieć, że objętość kulistego materiału powłoki wynosi Vc=4π(Ro3-Ri3)/3. Masa kulistej powłoki mc=ρVc, gdzie ρ jest gęstością materiału kulistej powłoki. Objętość wody wypuszczonej przez kulistą powłokę wynosi Vs=4πRo3/3. Wtedy średnia gęstość sferycznej powłoki r wynosi ρ jest gęstością materiału, która jest stałą dodatnią; człon (1-X3) X∈(0,1) ma zawsze wartość dodatnią i monotonnie maleje. Minimalna średnia gęstość kulistej powłoki spełniająca wymagania ciśnieniowe. Dlatego też, aby otrzymać optymalną konstrukcję odpornej na ciśnienie sferycznej powłoki hydrofonu wektora współwibracji, należy w pierwszej kolejności do wzoru na obliczenie Xmax podstawić wymagania ciśnieniowe p oraz właściwości materiału; Podstawiając Xmax do wzoru można uzyskać minimalną średnią gęstość kulistej powłoki, która spełnia wymagania ciśnieniowe. Zakładając całkowitą masę czujnika odbioru drgań, obwodu kondycjonowania sygnału i innych dodatkowych struktur wewnątrz hydrofonu wektora współwibracji, minimalna wartość średniej gęstości hydrofonu jest pewną wartością; w przypadku, gdy poniżej określono materiał kuli i wymaganą wytrzymałość na ciśnienie p, jest to również wartość określona. Dla hydrofonu wektorowego Ro wyznacza górną granicę fmax częstotliwości roboczej hydrofonu wektorowego. Wybiera się górną granicę częstotliwości roboczej hydrofonu wektorowego i wyznacza się promień zewnętrzny Ro powłoki sferycznej hydrofonu wektorowego. Następnie można uzyskać minimalną średnią gęstość hydrofonu i uzyskać czułość hydrofonu wektorowego na prędkość drgań. Podobnie, jeśli wybrana zostanie czułość hydrofonu wektorowego na prędkość drgań, to zgodnie z równaniem (3) można otrzymać średnią gęstość hydrofonu, w tym czasie wyznaczyć zewnętrzny promień kulistej powłoki hydrofonu oraz uzyskać wektor Górną granicę częstotliwości roboczej hydrofonu. Wykonując powyższe kroki, możemy znaleźć najbardziej odpowiedni materiał i teoretyczne optymalne rozwiązanie parametrów wielkości, takich jak promień zewnętrzny i grubość odpornej na ciśnienie sferycznej powłoki. Na podstawie podstawowych danych wymiarowych odpornej na ciśnienie kulistej powłoki przeprowadzany jest kolejny szczegółowy projekt. Po zakończeniu projektowania oprogramowanie do symulacji elementów skończonych służy do przeprowadzenia analizy rozkładu naprężeń i analizy wyboczenia zaprojektowanej powłoki odpornej na ciśnienie, aby upewnić się, że powłoka nie ulegnie uszkodzeniu wytrzymałościowemu i stabilności pod ciśnieniem obliczeniowym.
4 Przykład konstrukcyjny odpornej na ciśnienie sferycznej powłoki hydrofonu wektorowego
Obecnie głębokość robocza krajowych szybowców podwodnych głównego nurtu, boi profilowych i innych podwodnych platform bezzałogowych osiągnęła poziom 2000 m. Aby zapewnić pewien margines bezpieczeństwa, projektowa głębokość oporu ciśnieniowego hydrofonu została ustalona na 3000 m, czyli p=30 MPa.
4.1 Optymalizacja materiału powłoki
Po pierwsze, musimy wybrać najlepszy materiał metalowy na odporną na ciśnienie sferyczną powłokę hydrofonu wektora współwibracji. Tabela 1 zawiera listę właściwości mechanicznych kilku powszechnie stosowanych materiałów inżynierii głębinowej, takich jak stal nierdzewna 304, 316L, stopy aluminium 6061T6, 7075T6, stop tytanu TC4 i mosiądz H90. Mogą występować niewielkie różnice w odpowiednich wartościach materiałów). Podstawiając do wzoru wymagania dotyczące ciśnienia p i właściwości różnych materiałów z tabeli 1, można otrzymać materiały konstrukcyjne, które spełniają wymagania wytrzymałościowe Xi, wymagania stabilności Xs i oba Xmax; podstaw otrzymany Xmax do wzoru , Można otrzymać minimalną średnią gęstość, jaką można uzyskać w przypadku kulistej powłoki wykonanej z każdego materiału spełniającego wymagania ciśnieniowe. Jeżeli dany materiał spełnia wymagania wytrzymałościowe Xi jest mniejszy niż wymagania stabilności Xs, to z materiału formuje się kulę spełniającą wymagania wytrzymałościowe. W przypadku skorupy jego stabilność jest nadwyżka; podobnie, jeśli Xi określonego materiału jest większe niż Xs, gdy materiał jest przetworzony w kulistą powłokę spełniającą wymagania stabilności, jego wytrzymałość jest nadwyżka. Im bliższe są wartości Xi i Xs, tym bardziej zrównoważona jest wytrzymałość i stabilność sferycznej powłoki wykonanej z tego materiału. Spośród kilku materiałów pokazanych w Tabeli 2, Xi stopu tytanu TC4 jest większe niż Xs, co wskazuje, że wytrzymałość kulistej powłoki wykonanej z tego materiału jest nadwyżka, gdy spełnia ona wymagania stabilności. Z wyjątkiem TC4, wszystkie pozostałe materiały Xi są mniejsze niż Xs, co wskazuje, że stabilność kulistej powłoki wykonanej z tych materiałów jest nadwyżka przy spełnieniu wymagań wytrzymałościowych. Wśród materiałów w tabeli 2, Xi i Xs stopu aluminium 7075T6 i stopu tytanu TC4 są stosunkowo zbliżone, co wskazuje, że wytrzymałość i stabilność sferycznej powłoki wykonanej z tych dwóch materiałów są stosunkowo zrównoważone. Z tabeli 2 wynika, że przy założeniu wytrzymałości na ciśnienie 30 MPa, spośród kilku powszechnie stosowanych materiałów konstrukcyjnych wymienionych w tabeli, średnia gęstość sferycznej powłoki wykonanej ze stopu aluminium i stopu tytanu TC4 może osiągnąć gęstość bliską lub mniejszą od wody, co jest zgodne z wymaganiami konstrukcyjnymi współwibrującego hydrofonu wektorowego sferycznego. Wśród nich materiał ze stopu tytanu TC4 ma największy Xmax, czyli najcieńszą odporną na ciśnienie kulistą powłokę wykonaną z tego materiału. Odporna na ciśnienie kulista skorupa wykonana z materiału 7075T6 może osiągnąć najmniejszą średnią gęstość, pozostawiając największy margines masy dla innych struktur wewnętrznych. Ponadto stop aluminium ma większe zalety niż stop tytanu TC4 pod względem kosztów materiału i kosztów przetwarzania. Dlatego stop aluminium jest najlepszym materiałem do wytwarzania kulistych powłok hydrofonów wektorowych odpornych na ciśnienie.
4.2 Rozmiar konstrukcji kulistej odpornej na ciśnienie
Materiał ze stopu aluminium dobiera się do wykonania sferycznej powłoki hydrofonu o wytrzymałości na ciśnienie 30 MPa, a minimalna średnia gęstość sferycznej powłoki spełniająca wymagania ciśnieniowe wynosi 0,64×103 kg/m3, a X=0,9177 w tym czasie. Jeżeli czułość prędkości drgań hydrofonu wektorowego |v/v0| dozwolona jest wartość 0,8, faktyczna konstrukcja sferycznej powłoki hydrofonu powinna być zaprojektowana w dwóch połówkach, aby ułatwić montaż elementów wewnętrznych. Zakłada się, że dwie półkuliste powłoki hydrofonu są zmontowane. Suma mas dodatkowego mierzonego hydrofonu, akcelerometru, wspornika montażowego, układu kondycjonowania sygnału i wodoszczelnej komory penetracyjnej zastosowanej w rzeczywistym hydrofonie wynosi 99,5 g, a więc suma mas dodatkowych me=149,5 g. Otrzymuje się promień zewnętrzny Ro=36,48 mm sferycznej powłoki hydrofonu. X=Ri/Ro=0,9177, promień wewnętrzny otoczki sferycznej Ri=33,48 mm, grubość otoczki sferycznej=3,00 mm, dla wygody obliczeń, rysowania i obróbki promień wewnętrzny otoczki sferycznej Ri zaokrągla się w dół do 33 mm, promień zewnętrzny Ro wynosi 36mm.
4.3 Sprawdzenie wytrzymałości na napięcie wytrzymywane
Po uzyskaniu danych dotyczących wielkości kulistej powłoki odpornej na ciśnienie, aby upewnić się, że spełnia ona wymagania dotyczące odporności na ciśnienie, sprawdzana jest odporność na ciśnienie i rozważane są głównie dwa przypadki awarii wytrzymałości i utraty stabilności.
4.3.1 Awaria wytrzymałości
Z tabeli 1 wynika, że dopuszczalne naprężenie stopu aluminium użytego na kulistą powłokę wynosi 190 MPa, co w połączeniu z parametrami wielkości kulistej powłoki pozwala uzyskać wytrzymałość na zniszczenie, dopuszczalne ciśnienie kulistej powłoki wynosi 30,4 MPa, czyli więcej niż 30 MPa, co spełnia wymagania ciśnieniowe.
4.3.2 Brak stateczności
Współczynnik Poissona stopu aluminium μ=0,33, moduł Younga E=7,2×1010 Pa i układ stabilności m=14,52. Podstawiając dane materiałowe i wielkość skorupy sferycznej do równań (8) i (9) oblicza się krytyczne ciśnienie niestabilności obwodowej pcr=611,6 MPa, a dopuszczalne ciśnienie niestabilności obwodowej wynosi 42,1 MPa, czyli jest większe od 30 MPa, co spełnia wymagania ciśnieniowe. Można zauważyć, że odporna na ciśnienie sferyczna powłoka hydrofonu wektorowego wytrzymuje zewnętrzne ciśnienie hydrostatyczne o wartości 30 MPa. Dopuszczalne ciśnienie w przypadku niestabilności obwodowej jest większe niż dopuszczalne ciśnienie w przypadku uszkodzenia wytrzymałości. Jeśli ciśnienie na zewnątrz kulistej powłoki będzie nadal rosło, najpierw nastąpi efekt wytrzymałościowy.
4.4 Projekt techniczny osłony hydrofonu wektorowego
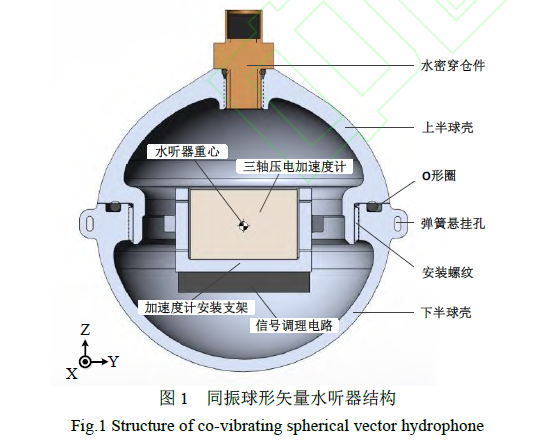
Po określeniu podstawowych danych, takich jak materiał, promień zewnętrzny i grubość odpornej na ciśnienie sferycznej powłoki hydrofonu wektorowego, można przystąpić do szczegółowego projektu płaszcza hydrofonu wektorowego. W artykule wykorzystano oprogramowanie do modelowania 3D do wykonania pomocniczego projektu hydrofonu wektorowego współwibracji sferycznych o dużej głębokości. Przekrój poprzeczny struktury hydrofonu wektorowego pokazano na rysunku 1.




 Tech Co,.Ltd")