Language



































要約: 深海ベクトル水中聴音器の構造的圧力問題を目指して、外圧球殻の最大応力公式を導き出し、共振動体の材質と寸法の影響を明らかにする。 ここでは、球形ベクトル水中聴音器 の音響性能と圧力性能を分析します。これに基づいて,最小平均密度薄肉耐圧球殻の設計法を与えた。代表的な深海工学材料を研究し、アルミニウム合金材料を選択し、設計耐圧深さ3000mの共振動球形ベクトル水中聴音器を製作した。ハイドロフォンの耐圧構造を有限要素法によりシミュレーションし、感度、指向性、耐圧性能を試験しました。結果は、ベクトル水中聴音器が良好なコサイン指向性を有し、感度が-188 dB@500 Hzであり、37.5MPaの外部圧力に耐えることができることを示しています。これにより、本論文で示した最小平均密度薄肉耐圧球殻の設計法とエンジニアリングが検証されました。試作設計の合理性と実現可能性
導入
の 共振動ベクトル水中聴音器は 音場媒体内の振動速度ベクトル情報を測定でき、単一のベクトル水中聴音器で音響目標の方向探知を完了できます。また、小型、低消費電力、高感度、中程度の周波数帯域という利点もあり、水中グライダーやプロファイルブイなどの水中無人プラットフォームに設置して、目標探知や海洋環境騒音モニタリングなどのタスクを実行するのに非常に適しています。現在、耐圧技術の発展に伴い、さまざまな水中無人プラットフォームの作業深度が増加しており、ベクトル水中聴音器の耐圧性能に対する要件がさらに高まっています。米国、ロシア、その他の国は、作動深度 5000 ~ 6000 m のベクトル水中聴音器を開発しました。国内ではまだ研究の初期段階にある。エポキシ樹脂とガラスマイクロビーズ複合材料のポッティングと主体油充填により耐圧深さ1000mのベクトル水中聴音器を作製した。ハイドロフォンの感度と指向性は満足のいくものではありません。外側の複合シェルと内側のアルミニウム合金シェルの二層シェル方式を使用して、耐圧深さ 2000 m のベクトル水中聴音器を設計します。サイズが大きいため、周波数の上限はわずか 1000 Hz です。耐圧複合共振動ベクトル水中聴音器は、金属シェルをポリウレタン シェルで覆うように設計および製造されました。潜水テスト、最大潜水深度は1200mです。カプセル型アルミニウム合金薄胴設計により、耐圧20MPaの共振動ベクトルハイドロフォンを実現しました。この論文では、圧力容器設計の関連理論を大深度ベクトル水中聴音器の設計に適用し、高強度金属材料で作られた単層薄壁球状シェルをベクトル水中聴音器の抵抗シェルとして直接使用します。この方式のプロセスは比較的単純であり、大きな耐電圧深さに達することができます。この方式では、耐圧性能が要求を満たすことを前提として、ベクトル水中聴音器の音響性能を可能な限り向上させるために、球殻の材質を選択し、球殻のサイズをどのように設計するかが、ベクトル水中聴音器の圧力球殻の設計の鍵となる。
1 共振動球面ベクトル水中聴音器の音響性能に影響を与える要因
共振すると、 低周波ベクトル水中聴音器は 水中音場で動作し、音場の作用を受けて振動します。その振動速度を v に設定します。また、ハイドロフォンが音場に配置されていないときの元のハイドロフォンの幾何学的中心の位置を設定します。媒質粒子の振動速度を v0 とすると、次の関係式 (3) の前提条件は音波の周波数 fc 2 π R で表すことができます。式 (3) から、共振球面ベクトル水中聴音器の動作周波数の上限が oc 2 π R よりもはるかに小さい場合、水中聴音器の平均密度が小さいほど、振動速度振幅 v が小さくなり、音場内の水質点の振動が小さくなることがわかります。速度振幅比の絶対値が大きいほど、ハイドロフォンの振動速度の感度が高くなり、ハイドロフォンの振動速度と水質点の振動速度との位相差がゼロに近づく。共振動ベクトル水中聴音器には振動ピックアップ センサー、信号調整回路、その他の追加構造も装備されているため、ベクトル水中聴音器の平均密度 vr が水の密度 ρ 0 より小さいことを認識するのは困難です。工学では一般に、水中聴音器の平均密度が水媒体の密度に近いことを追求します。このとき、ハイドロフォンは音場内の水質点の振動速度をほぼ1:1で拾うことができ、ハイドロフォンの動作周波数の上限は同じ振動ベクトルの水とすることができる。リスナーの音響性能には、主に感度、指向性、使用周波数帯域が含まれます。内部振動ピックアップ センサーの感度が一定の場合、ハイドロフォンの感度はその平均密度によって決まります。平均密度が小さいほど、ハイドロフォンの感度は高くなります。ハイドロフォンの指向性は、主に内部の振動ピックアップ センサーの横方向の感度によって決まります。ハイドロフォンの形状も指向性に影響します。ハイドロフォンが標準の球形に近づくほど、指向性に対する干渉が少なくなります。内部振動ピックアップ センサーの周波数の上限は一般に高いため、ハイドロフォンの動作周波数帯域の上限は、一般にハイドロフォンの外半径 Ro によって決まります。外半径が小さいほど、ハイドロフォンの動作周波数の上限は高くなります。したがって、共振動ベクトルハイドロフォンの耐圧球殻を設計する際には、ハイドロフォンの音響性能を最大限に発揮させるためには、耐圧性能を満足することを前提として、球殻の平均密度rを可能な限り小さくする必要がある。同時に外周半径 Ro はできるだけ小さくしてください。共振動球面ベクトル水中聴音器の周波数の上限では、外半径が小さいほど良いことが求められます。共振動する球面ベクトル水中聴音器の感度には、平均密度が小さいほど優れている必要があります。材質や厚みが変わらない場合、外周半径が小さくなると、代わりに平均密度が増加するという矛盾が生じます。共振動球面ベクトルハイドロフォンの圧力性能には、外径が小さいほど、厚さが厚く、材料強度が高いほど優れていることが求められます。外半径が小さくなり、厚さが厚くなるほど、平均密度は大きくなりますが、これも矛盾しています。共振動球面ベクトルハイドロフォンの耐圧性と音響性能は、耐圧性の要件を満たすことを前提として、球殻をできるだけ小さく(高感度)、外径をできるだけ小さく(高周波上限)設計する必要があり、これらの制約が相互に制約を与えます。以下では、共振動球型ベクトルハイドロホンの材質、外径、球殻厚と耐圧性能、感度、高周波上限値との関係を検討し、耐圧性能を満足する前提で最も音響性能の良いベクトルを求めます。ハイドロフォンの耐圧球状シェルの設計スキーム。
2 外圧下における薄肉球殻の破壊解析
共振動球形ベクトル水中聴音器が水中で通常に動作するとき、その耐圧性の球形シェルは外部から静水圧を受けます。外部圧力容器です。腐食破壊を考慮しないと、強度破壊と安定性破壊という 2 つの主な破壊モードがあります。
2.1 強度低下
強度破壊とは、圧力容器内の材料の最大応力が降伏点を超えると、材料が弾性変形から塑性変形に変化し、その結果、不可逆的な変形または破壊が生じることを意味します。最大主応力理論と弾性破壊基準によれば、外圧球殻に強度破壊が存在しない場合、最大応力 T は球殻に使用されている材料の強度破壊許容応力以下である必要があります。圧力容器設計の分野では、外圧球殻を設計する際に最大応力公式が使用されます。この公式はエンジニアリングの経験を要約した公式です。計算は簡単ですが、その成立には球殻が薄肉殻であること、つまりRo/Riが必要となります。 ≤ 1.35、ここで Ro は球殻の外半径、Ri は内半径です。この式を用いて得られる解は局所最適解に属する。そこで、外圧球殻の最大応力を再導出します。球殻にかかる外圧を p 、 δとします。 球殻の厚さを回転殻のモーメントフリー理論によれば、外圧を受けた薄肉球殻内部の半径方向応力は非常に小さく、軸方向圧縮応力 Tzz と円周方向圧縮応力 T θθのみ が考慮されます。球殻の幾何学的形状は球の中心に対して対称であるため、軸方向の圧縮応力と周方向の圧縮応力は等しい値となります。球の中心を通る断面において、球殻の断面にかかる外圧 p の合力は Fs=p π Ro2、の断面積Ss= 殻材料π (Ro2-Ri2) となるので、外圧球殻の Tzz と T θθ は球殻の強度破壊最大許容外圧 pi を満たす必要があります。
2.2 安定性の障害
安定性破壊とは、外部荷重の作用下で圧力容器が安定した平衡状態から不安定な状態に破壊され、突然元の幾何学的形状を失うことを指します。球殻の厚さが非常に薄い場合、強度破壊より先に不安定破壊が起こることが多い。外圧を受けた薄壁の球殻の場合、臨界座屈圧力 pcr の計算式は微小変形理論から導出されます。ここで、E は球殻材料のヤング率、材料のポアソン比です。微小変形理論臨界圧力式の計算は比較的単純ですが、誤差は比較的大きいため、安全係数 m を大きくすることで補償できます。 GB 150.3 では m=14.52 と規定されています。このとき、薄肉球殻の安定性破壊に対する最大許容外圧 ps を満足する必要があります。
3 ベクトル水中聴音器の耐圧球殻の最適設計
耐圧球殻 ベクトル水中聴音器トランスデューサは 故障しないため、最大許容外部圧力 p=min(pi, ps) を満たす必要があります。材料自体のパラメータに加えて、球殻の最大許容外圧 p は Ri/Ro にのみ関係します。変数 X=Ri/Ro を定義します。 X が球殻の内半径と外半径の比 X∈(0,1) であることは簡単にわかります。この変数は無次元であり、X が大きいほど球殻は薄くなります。与えられた材料の許容応力 T と球殻の最大許容外圧 p の後、球殻が強度要件を満たす X の最大値が得られ、Xi として記録されます。同様に、ヤング率 E、ポアソン比 μ、および球殻の最大許容外圧 p の後、球殻が安定性要件を満たす X の最大値を次の式に従って取得でき、これは Xs として記録されます。共振動する球形ベクトル水中聴音器は、外部の静水に耐えることができます。圧力 p の機能は故障せず、耐圧球殻は強度破壊がないことと安定性破壊がない条件を同時に満たす必要があり、同時に要件を満たす X の最大値は X = min X, X (12) Xmax が決定されます。その後、球殻の最小平均密度をさらに取得できます。球殻材料の体積は、Vc=4π(Ro3-Ri3)/3であることが分かります。球殻の質量 mc=ρVc、ここで ρ は球殻材料の密度です。球殻から排出される水の体積は、Vs=4πRo3/3となる。この場合、球殻の平均密度 r は次のようになります。ρ は材料の密度であり、正の定数です。 (1-X3) 項 X∈(0,1) は常に正の値であり、単調減少します。圧力要件を満たす球殻の最小平均密度。したがって、共振動ベクトル水中聴音器の耐圧球殻の最適な設計を得るには、まず圧力要件 p と材料の特性を式に代入して Xmax を計算する必要があります。 Xmax を式に代入すると、圧力要件を満たす球殻の最小平均密度を取得できます。共振動ベクトルハイドロフォン内の振動ピックアップセンサー、信号調整回路、およびその他の追加構造の総質量を仮定すると、ハイドロフォンの平均密度の最小値は特定の値になります。以下、球殻材質と耐圧要求pが決まる場合の確定値でもある。ベクトル水中聴音器の場合、Ro はベクトル水中聴音器の動作周波数の上限 fmax を決定します。ベクトル水中聴音器の動作周波数の上限が選択され、ベクトル水中聴音器の球殻の外半径 Ro が決定されます。次に、水中聴音器の最小平均密度を取得することができ、ベクトル水中聴音器の振動速度感度を取得することができます。同様に、ベクトルハイドロフォンの振動速度感度を選択すると、式(3)に従ってハイドロフォンの平均密度が得られ、このときのハイドロフォンの球殻の外半径が求められ、ベクトルハイドロフォンの動作周波数の上限が得られる。以上の手順により、最適な材質と耐圧球殻の外径や厚さなどのサイズパラメータの理論的最適解を求めることができます。そして、耐圧球殻の基本寸法データを基に、次の詳細設計を行っていきます。設計が完了したら、有限要素シミュレーション ソフトウェアを使用して、設計された耐圧シェルの応力分布解析と座屈解析を実行し、設計圧力下でシェルに強度破壊や安定性破壊が発生しないことを確認します。
4 ベクトル水中聴音器の耐圧球殻の設計例
現在、国内の主流の水中グライダー、プロファイルブイ、その他の水中無人プラットフォームの作動深度は2000メートルのレベルに達しています。一定の安全マージンを持たせるため、水中聴音機の設計耐圧深さは 3000 m、つまり p=30 MPa に設定されています。
4.1 シェル材料の最適化
まず、共振動ベクトル水中聴音器の耐圧球殻に最適な金属材料を選択する必要があります。表 1 に、304、316L ステンレス鋼、6061T6、7075T6 アルミニウム合金、TC4 チタン合金、H90 真鍮など、一般的に使用されるいくつかの深海工学材料の機械的特性を示します。材料の関連値には若干の違いがある場合があります)。表 1 の圧力要件 p とさまざまな材料の特性を式に代入すると、Xi の強度要件、Xs の安定性要件、および両方の Xmax を満たすこれらのエンジニアリング材料を得ることができます。得られたXmaxを式 に代入すると、圧力条件を満たす各材質の球殻が達成できる最小の平均密度が求められます。特定の材料が強度要件を満たす Xi が安定性要件 Xs より小さい場合、その材料は強度要件を満たすボールになります。シェルの場合、その安定性は余剰です。同様に、ある材料のXiがXsより大きい場合、その材料を安定性の要件を満たす球殻にすると、その材料の強度は余剰になります。 Xi と Xs の値が近いほど、この材料で作られた球殻の強度と安定性のバランスが良くなります。表2に示したいくつかの材料の中で、TC4チタン合金のXiはXsよりも大きく、この材料で作られた球殻の強度が安定性要件を満たす場合には余剰であることを示しています。 TC4 を除く残りの材料の Xi はすべて Xs より小さく、これらの材料で作られた球殻の安定性は強度要件を満たす上で過剰であることを示しています。表2の材料の中で、7075T6アルミニウム合金とTC4チタン合金のXiとXsは比較的近く、これら2つの材料からなる球殻の強度と安定性が比較的バランスが取れていることを示している。表2から、表中に挙げた一般的に使用されるいくつかの工学材料のうち、30MPaの耐圧を満たすことを前提とした場合、アルミニウム合金およびTC4チタン合金からなる球殻の平均密度は、水の密度に近いかそれ以下の密度を達成でき、これは共振動球形ベクトル水中聴音器の設計要件と一致していることが分かる。その中でも最もXmaxが大きいのがTC4チタン合金材、つまりこの材質で作られた耐圧球殻の中で最も薄いものです。 7075T6 材料で作られた耐圧球状シェルは最小の平均密度を実現し、他の内部構造に最大の質量マージンを残します。また、アルミニウム合金は、材料コストや加工コストの面でもTC4チタン合金に比べて優れています。したがって、アルミニウム合金は、ベクトルハイドロフォンの耐圧球状シェルを作成するのに最適な材料です。
4.2 耐圧球殻の寸法設計
アルミニウム合金材料は、耐圧性が 30 MPa のハイドロフォン球殻を作成するために選択され、圧力要件を満たす最小の球殻の平均密度は 0.64×103 kg/m3 であり、このとき X=0.9177 です。ベクトル水中聴音器の振動速度感度 |v/v0| の場合が 0.8 まで許容される場合、ハイドロホン球状シェルの実際の設計は、内部コンポーネントの取り付けを容易にするために 2 つの半分に設計される必要があります。ハイドロフォンの 2 つの半球シェルが組み立てられていると仮定します。実際のハイドロフォンで使用される、測定されたハイドロフォン、加速度計、取り付けブラケット、信号調整回路、および防水貫通チャンバーの追加質量は 99.5 g であるため、追加質量の合計 me = 149.5 g となります。水中聴音器の球殻の外半径Ro=36.48mmが得られる。 X=Ri/Ro=0.9177、球殻の内半径Ri=33.48mm、球殻の厚さ=3.00mm、計算、作図、加工の都合上、球殻の内半径Riは33mmに切り捨てられ、外半径Roは36mmとなる。
4.3 耐電圧性能の確認
耐圧球殻のサイズデータを取得した後、耐圧要件を満たしていることを確認するために、耐圧性能をチェックし、主に強度不良と安定性不良の 2 つのケースを考慮します。
4.3.1 強度低下
表 1 から、球殻に使用されるアルミニウム合金の許容応力は 190 MPa であることがわかり、これに球殻のサイズ パラメーターを組み合わせると、球殻の強度破壊許容圧力は 30.4 MPa となり、圧力要件を満たしている 30 MPa より大きくなります。
4.3.2 安定性の障害
アルミニウム合金のポアソン比μ=0.33、ヤング率E=7.2×1010Pa、安定系m=14.52である。材料データと球殻サイズを式 (8) と (9) に代入すると、臨界不安定圧力 pcr=611.6 MPa が計算され、許容円周不安定圧力は 42.1 MPa となり、30 MPa より大きく、圧力要件を満たします。ベクトルハイドロホンの耐圧球殻は外部静水圧30MPaに耐えられることがわかります。また、円周方向の不安定性の許容圧力は、強度破壊の許容圧力よりも大きくなります。球殻の外側で圧力が増加し続けると、最初に強度効果が発生します。
4.4 ベクトル水中聴音器圧力シェルの工学設計
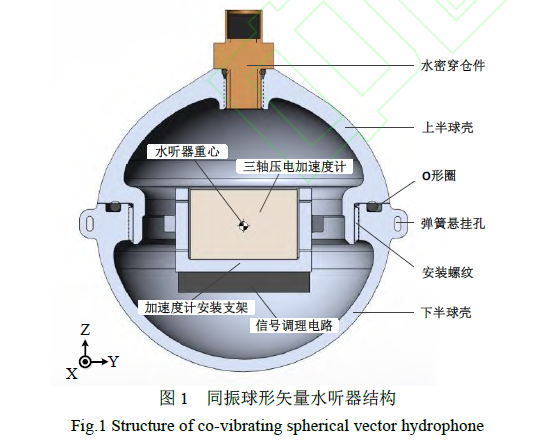
ベクトル水中聴音器の耐圧球殻の材質、外径、厚さなどの基本データが決定したら、ベクトル水中聴音器シェルの詳細設計を行うことができます。本論文は,3Dモデリングソフトウェアを使用して,深さの大きい球面共振動ベクトル水中聴音器の補助設計を実行した。ベクトルハイドロフォン構造の断面図を図 1 に示します。




 Tech Co,.Ltd")