Language




























|






| Ilość: | |
|---|---|
PH75F0256
Piezohanny
PH75F0256
Ultradźwiękowy przetwornik odległości 75 kHz do dalmierza ultradźwiękowego
Wstęp:
Czujnik ultradźwiękowy PH75F0256 posiada funkcje nadajnika i odbiornika. Jest to typ dalekiego zasięgu, ogólnie może być używany do dalmierzy ultradźwiękowych, czujników ultradźwiękowych do bezdotykowego wykrywania obiektów, ultradźwiękowych czujników odległości, ultradźwiękowych czujników poziomu cieczy itp. Jeśli masz pytania dotyczące innych zastosowań, skontaktuj się z nami, aby uzyskać szczegółowe informacje.
Parametry techniczne:
Model |
PH75F0256 |
Środkowa częstotliwość rezonansowa (kHz) |
75 kHz ± 40,0 kHz |
częstotliwości Szerokość pasma |
6,0 kHz |
Odległość wykrywania |
0,25 ~ 6 m |
Martwe punkty |
<0,25 m |
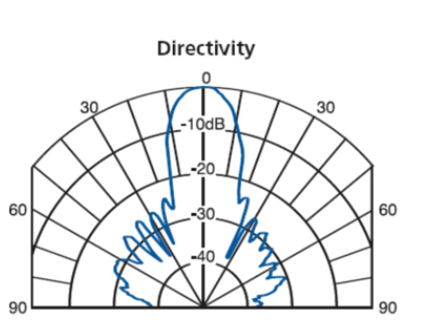
Uruchomienie wiązki kątowej (- 3dB pełny kąt) |
14±2° |
Zintegrowana czułość (0 dB=200 Vp-p ;okres : 50;odległość : 40 cm) |
-60 dB min |
Pojemność elektrostatyczna |
2000PF±20% |
Minimalna impedancja równoległa |
200Ω±30% |
Maksymalne napięcie robocze (impuls - 2% cyklu pracy) |
< 800 V |
Temperatura robocza |
-20 ~ 80 ℃ |
Temperatura przechowywania |
-40 ~ 85 ℃ |
Poziom ochrony |
IP65 |
Instalacja |
Cykl zewnętrzny ustalony |
Materiał obudowy |
ABS |
Zdjęcie:
![TAK 6J}EZC]6U[BAHM@K8`W (1)](http://5krorwxhlkpmrik.leadongcdn.com/cloud/llBqnKjlRioSilmrnkio/YEPJ-EZCU-BAHM-K8-W.png "8[4MN3}X8%J@D0O{B03T%1.png")
Wymiar zarysu:

Krzywa częstotliwości i rezystancji :
![636T30@{6]KA8JQ1UT(FB8](http://5krorwxhlkpmrik.leadongcdn.com/cloud/loBqnKjlRioSilmrqkio/636T30-KA8JQ1UT-FB8.png "(V3$69N26LR7859OT}M5[LC.png")
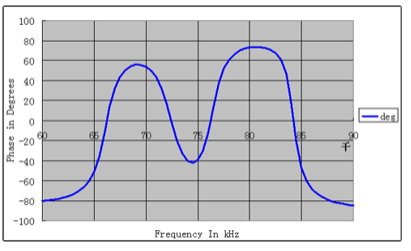
częstotliwości i kąta fazowego Krzywa :
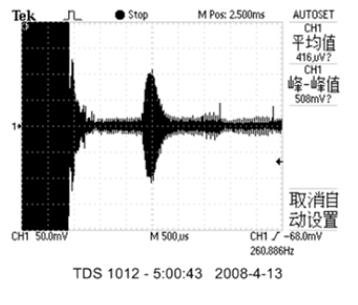
Test wrażliwości:
Napięcie transmisji: 200Vp-p; okres: 50; odległość: 40C M
Krzywa kierunkowości :
Charakterystyczny:
1. Solidne opakowanie (skorupa ze stopu ABS lub aluminium)
2. Instalacja celowo (śruba M20*1,5)
Aplikacja:
1.Ustaw lokalizację
2.Pomiar zbliżeniowy
3. Pomiar ruchu
4.Unikanie przeszkód













 Tech Co,.Ltd")